
Deze robotvis mengt zich in het onderwaterleven
Ingenieurs van het Massachusetts Institute of Technology (MIT) hebben de Soft Robotic Fish, roepnaam SoFi, ontwikkeld. De robotvis dient voor onderzoek naar het leven in de oceaan. Met haar vinnen kan SoFi stijgen en dalen in het water, en ze beweegt zich heel natuurlijk voort met een golvende staartvin.
Biologen kunnen natuurlijk zelf flippers aandoen, een duikbril opzetten en zich onder water begeven. Maar ze hebben ook verschillende apparaten tot hun beschikking om het onderwaterleven te onderzoeken. Ze gebruiken ROVs (remotely operated vehicles, van afstand bestuurbare vaartuigen) en AUVs (autonomous underwater vehicles, autonome onderwatervaartuigen), die allebei geschikt zijn om met hun camera’s van dichtbij opnamen te maken van dieren.
Die apparaten worden allemaal al gebruikt, maar ze hebben een groot nadeel: dieren schrikken van de grootte van dergelijke apparaten, maar ook van de schroef of waterstraal die bij zo'n vaartuig dient als aandrijving. En de meeste van deze machines moeten voor hun stroomvoorziening nog aan een kabel hangen, die is verbonden met een onderzoeksschip aan de oppervlakte.
Biologen zouden dus maar wat graag kleine, onopvallende en energiezuinige apparaatjes hebben om op de dieren af te sturen. De nieuwe robotvis SoFi van technici van MIT komt dan ook als geroepen.
Zachte huid
SoFi is een robotische vis van bijna 40 cm lang, met een buitenkant van zacht, buigzaam kunststof, die zich voortbeweegt als een echte vis. Het vloeiend heen en weer gaan van de staartvin wordt geregeld door een hydraulisch systeem dat werkt met waterdruk. Aan zijn voorkant heeft hij een camera (van het type fisheye uiteraard), het voor biologen belangrijkste instrument om onderzoek mee te doen.
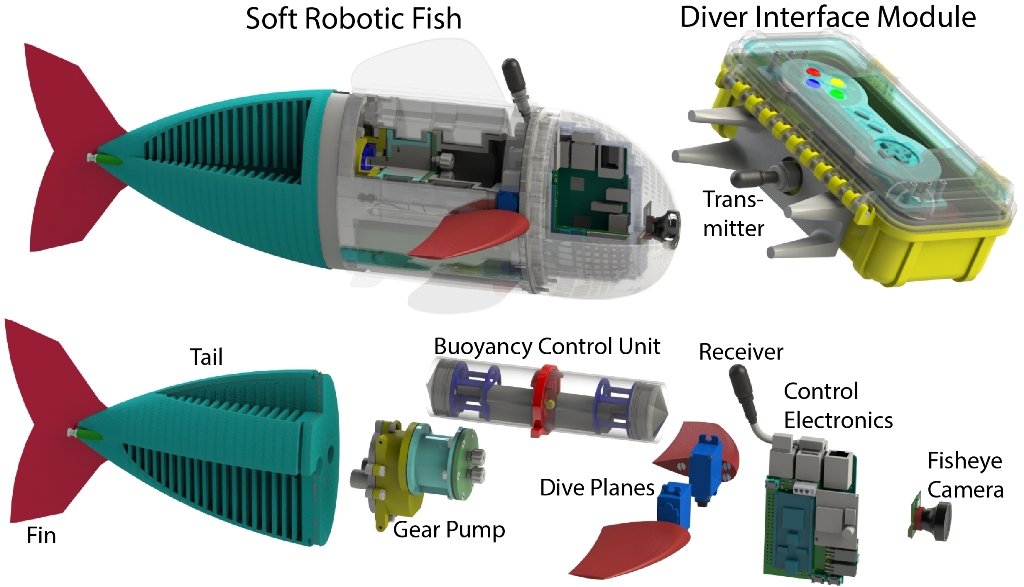
Duiken en stijgen
Er bestonden al eerder robotvissen (lees: 'Robotpaling meet waterkwaliteit'), maar die konden nog niet in drie dimensies bewegen; enkele op dezelfde diepte vooruit blijven zwemmen en een beetje linksaf of rechtsaf buigen. SoFi kan echt duiken en stijgen, door haar zijvinnen te draaien en via een speciaal intern systeem dat het drijfvermogen kan instellen.
SoFi observeert dus continu haar omgeving met de camera. Aan de hand daarvan kan ze snel haar koers bijstellen. De eerste tests in de zee laten zien dat andere vissen niet schrikken van haar aanwezigheid. Ze blijven rustig in de omgeving waar ze al waren als SoFi aan komt zwemmen.
Akoestisch modem
Communicatie onder water is nog een verhaal apart. Omdat er geen WiFi-netwerk is, zochten de MIT-technici het in geluidsgolven om gegevens over te dragen. Ze ontwikkelden een zogeheten akoestisch modem, waarmee een duiker opdrachten kan versturen naar de robotvis. Een in de vis geïntegreerde ontvanger pikt de gecodeerde geluidsgolven op en zet ze om in opdrachten voor de besturing van de vis. Dat dit prima werkte in de praktijk demonstreerde een duiker door SoFi succesvol door ingewikkelde structuren van koraal te manoeuvreren.
Om de betrouwbaarheid van de dataoverdracht te testen, lieten ze het modem steeds een reeks van tweehonderd enen en nullen – die elkaar afwisselden – naar SoFi sturen met een snelheid van 20 bits/s; en dit op verschillende dieptes en over verschillende afstanden. Hieruit blijkt dat de communicatie op een diepte van 1,8 m foutloos is tot op 15 m afstand; en dat op 21 m afstand nog altijd 97 % van de data goed doorkomt.

Scholen van SoFi’s
SoFi is dus goed nieuws voor biologen. Er lopen nog meer proeven om te kijken wat de invloed van SoFi is op het onderwaterleven. Daarnaast willen de onderzoekers meerdere exemplaren van de robotvis gaan bouwen, zodat in de toekomst hele scholen van SoFi’s grotere delen van de oceaan in beeld kunnen gaan brengen.





