De sociale robot komt eraan
Robots worden een steeds belangrijker onderdeel van de maatschappij. Maar om ze ooit echt te laten integreren en prettig in gebruik te maken, moeten ze sociaal gedrag leren. Daarom werken onderzoekers er koortsachtig aan om robots manieren bij te brengen.
De robot als hersenloos werkapparaat is mooi voor volledig geautomatiseerde fabrieken, maar heeft veel beperkingen. Mensen kunnen er niet bij in de buurt komen, want de robot let niet op zijn omgeving en heeft geen intelligentie als het gaat over menselijke aanwezigheid. Het is typerend voor het soort robot waar we nu vaak aan denken, maar het is ook al ouderwets. De echte robot van de toekomst denkt na, weet zich soepel en onopvallend langs mensen te bewegen en reageert op een natuurlijke manier.
Verschillende universiteiten en onderzoeksinstellingen werken daarom aan de sociale robot, die naast zijn beoogde functie (het verzorgen van ouderen, het werken in een fabriekshal naast mensen, of het rondleiden van toeristen) een pakketje 'sociale software' aan boord heeft. Die software bevat bijvoorbeeld een paar regels, waarna de robot het goede gedrag leert door te oefenen. Hij doorloopt een soort kindertijd, een trainingsperiode zoals een hond leert te zitten en pootjes te geven.
Gemakkelijk zal het voor de robot niet zijn, want mensen doen onbewust een heleboel sociale dingen. Maar nu de sensoren zoals camera's steeds beter worden, en de ervaring met de ontwikkeling van lerende programmatuur groeit, kan een robot ook steeds meer van de wereld om zich heen bevatten.
Waar staan we op dit ogenblik?
Hoogleraar Vanessa Evers Universiteit Twente
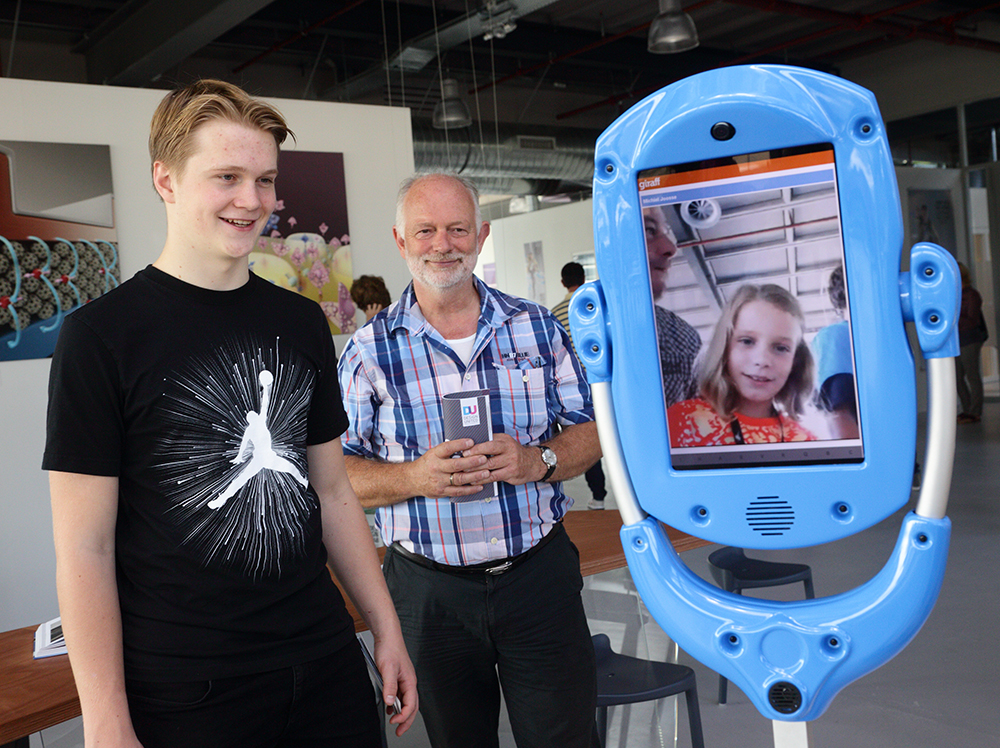 TERESA, de robot met een tablet als hoofd, maakt via een Skype-achtige verbinding constant contact met de mensen om zich heen en heeft een sociaal bewegingspatroon. Daardoor let hij op wat de gepaste afstand tot een gesprekspartner is, passeert hij op nette wijze mensen die in de weg staan, en draait hij zich in een groepsgesprek naar de pratende persoon toe.
TERESA, de robot met een tablet als hoofd, maakt via een Skype-achtige verbinding constant contact met de mensen om zich heen en heeft een sociaal bewegingspatroon. Daardoor let hij op wat de gepaste afstand tot een gesprekspartner is, passeert hij op nette wijze mensen die in de weg staan, en draait hij zich in een groepsgesprek naar de pratende persoon toe.
Hoogleraar Catholijn Jonker TU Delft
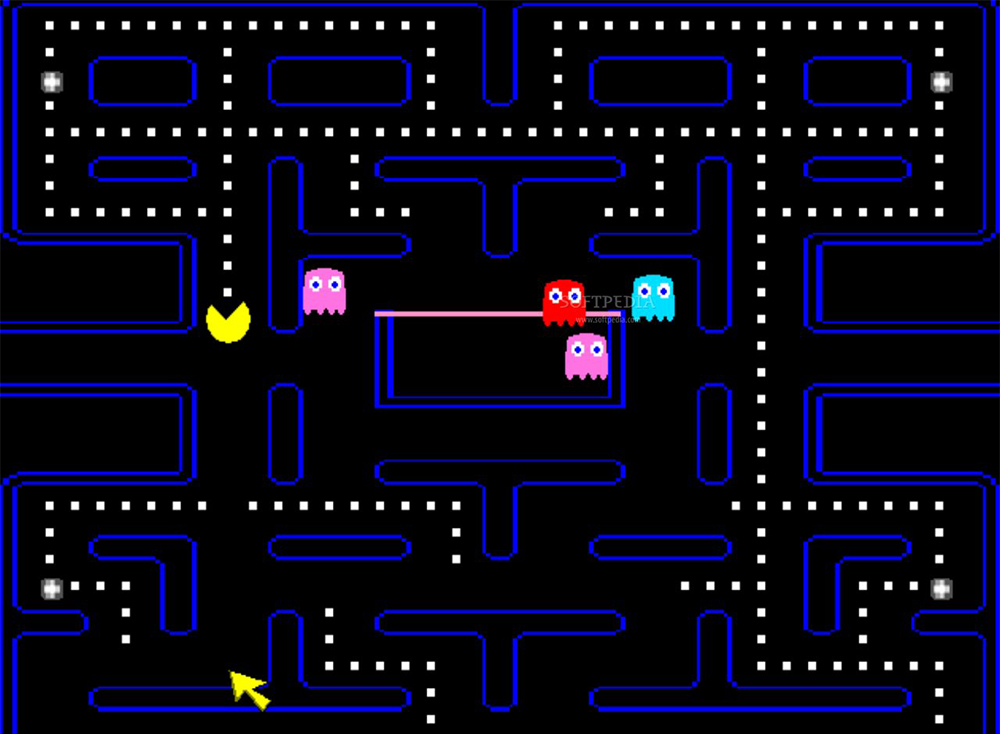 Een experiment is een Pacman-achtig spelletje, waarbij de Pac-man leert wat angst is. Op het moment dat hij in het doolhof een spookje tegenkomt en doodgaat, past het programma zich aan. Pac-man gaat de keer daarna voorzichter de hoek om, denkt langer na voordat hij beweegt, enzovoorts. Het risico van doodgaan zorgt ervoor dat het programma langzaamaan angstig wordt om te snel dingen te doen. Via dat soort mechanismen zijn een robot allerlei menselijke trekjes aan te leren, waaronder vriendelijkheid, behulpzaamheid en medeleven.
Een experiment is een Pacman-achtig spelletje, waarbij de Pac-man leert wat angst is. Op het moment dat hij in het doolhof een spookje tegenkomt en doodgaat, past het programma zich aan. Pac-man gaat de keer daarna voorzichter de hoek om, denkt langer na voordat hij beweegt, enzovoorts. Het risico van doodgaan zorgt ervoor dat het programma langzaamaan angstig wordt om te snel dingen te doen. Via dat soort mechanismen zijn een robot allerlei menselijke trekjes aan te leren, waaronder vriendelijkheid, behulpzaamheid en medeleven.
Onderzoeker Wijnand Ijsselstein van de TU Eindhoven
 Robots hebben feedback loops nodig. Na onwenselijk gedrag moet hij weten een bepaalde handeling nooit meer te doen, bijvoorbeeld het omgooien van een glas water. Het lastige is, mag hij dan nooit meer met water gooien, ook als er brand is? Gedrag moet dus zijn gekoppeld aan een bepaalde context. De robot moet door voortdurende leren en uiteindelijk generaliseren.
Robots hebben feedback loops nodig. Na onwenselijk gedrag moet hij weten een bepaalde handeling nooit meer te doen, bijvoorbeeld het omgooien van een glas water. Het lastige is, mag hij dan nooit meer met water gooien, ook als er brand is? Gedrag moet dus zijn gekoppeld aan een bepaalde context. De robot moet door voortdurende leren en uiteindelijk generaliseren.
Hoogleraar Mark Neerincx van onderzoeksinstituut TNO
 Een intelligente jukebox voor dementerende bejaarden. Muziek kan helpen om het aftakelingsproces te vertragen en dat werkt beter als die aan de persoonlijke smaak voldoet. Daarvoor is spraakherkenning ontwikkeld, die het gevoel geeft dat de machine het snapt als de bejaarde hem aanspreekt. De robot mag ook niet te menselijk overkomen. Anders is ouderen niet duidelijk dat de robot niet op een menselijk niveau communiceert.
Een intelligente jukebox voor dementerende bejaarden. Muziek kan helpen om het aftakelingsproces te vertragen en dat werkt beter als die aan de persoonlijke smaak voldoet. Daarvoor is spraakherkenning ontwikkeld, die het gevoel geeft dat de machine het snapt als de bejaarde hem aanspreekt. De robot mag ook niet te menselijk overkomen. Anders is ouderen niet duidelijk dat de robot niet op een menselijk niveau communiceert.
Onderzoekers Carlos Hernandez en Kanter van Deurzen van TU Delft
 Aangepaste versie van de robotarm van Universal Robotics, Met behulp van een camera die de omgeving bekijkt, en geavanceerde, dynamische bewegingsregels zoekt de robot zijn eigen pad om een taak uit te voeren die een mens eerder voordeed. Uiteindelijk moet dat leiden tot een robot die, dankzij artificiële huid, merkt als een mens hem vastpakt en aan de hand van de druk begrijpt wat er van hem wordt verwacht.
Aangepaste versie van de robotarm van Universal Robotics, Met behulp van een camera die de omgeving bekijkt, en geavanceerde, dynamische bewegingsregels zoekt de robot zijn eigen pad om een taak uit te voeren die een mens eerder voordeed. Uiteindelijk moet dat leiden tot een robot die, dankzij artificiële huid, merkt als een mens hem vastpakt en aan de hand van de druk begrijpt wat er van hem wordt verwacht.
Lees het complete artikel over sociale robots op ![]()





