

Zachte kunstspieren voor robots
Wetenschappers en ingenieurs van Harvard University en MIT hebben een mechanisme bedacht om een robot zachte kunstmatige spieren te geven. Een frame in een opblaasbaar zakje kan, afhankelijk van de vorm, verschillende bewegingen opleveren.
De robots die je bijvoorbeeld vindt in de auto-industrie zijn groot, oersterk en maken snelle, ferme bewegingen. Maar voor veel toepassingen van robots is die aanpak helemaal niet geschikt. Daar is een zachte aanpak gewenst, soft robotics, bijvoorbeeld omdat er mensen in de buurt zijn (lees ook: ‘Bionische robotarm met octopusgrijper’ en ‘Eerste volledig zachte robot’).
Aan Harvard University en MIT hebben onderzoekers nu een soort spieren van kunststof gemaakt, die licht zijn, maar toch behoorlijk sterk. Sommige versies van de spieren kunnen tot duizend keer hun eigen gewicht optillen. Dat is een nieuwe vinding van dit onderzoek; eerdere kunstspieren waren veel minder krachtig. ‘We waren hierdoor echt verrast. We wisten dat de spieren met ons ontwerp krachtiger zouden zijn, maar duizend keer, nee’, aldus hoogleraar Daniela Rus van het MIT in een persbericht.
Frame
Elke spier bestaat uit drie onderdelen. Ten eerste een frame dat gemaakt is van een metalen spoel of een vel plastic dat in een bepaalde vorm is gevouwen. Daaromheen zit de ‘huid’ van kunststof of rubber. Als derde, en cruciale, onderdeel is er het medium in dit zakje. Dit kan lucht zijn of een vloeistof; maar het belangrijkste is dat er in de spier een vacuüm wordt gecreëerd, waardoor de spier ineenkrimpt (en vice versa).
Voorgebakken
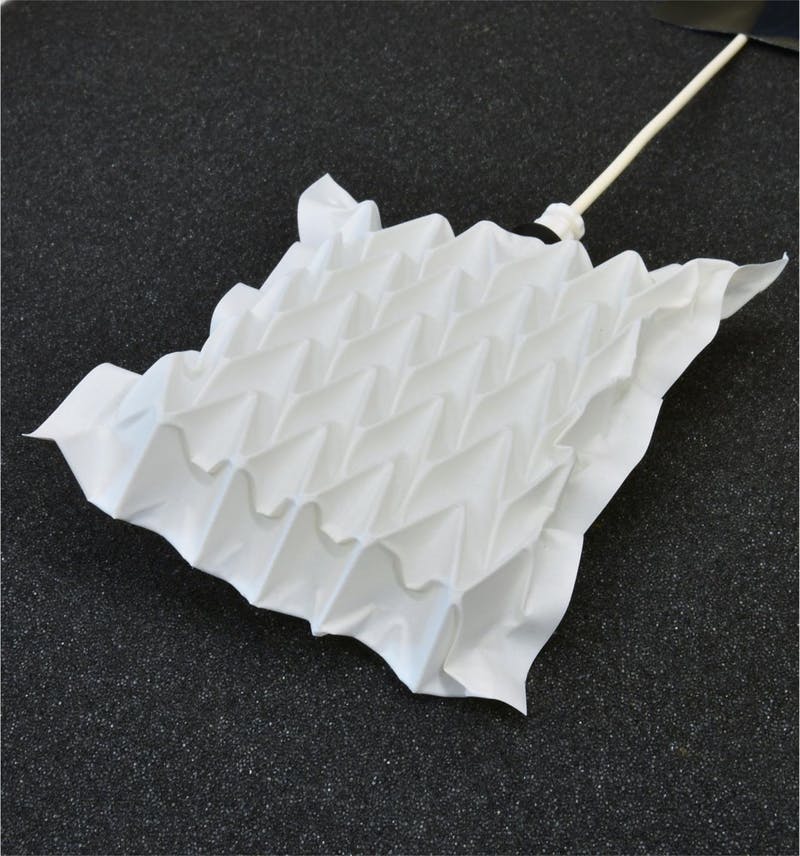
beweging de ‘spier’ bij opblazen of inkrimpen zal
maken.
Opvallend is het feit dat de bewegingen van de spieren zijn voorgebakken in het materiaal. Anders gezegd: door de precieze structuur van het frame en de huid maakt de ‘spier’ bij opblazen of inkrimpen een bepaalde beweging, die helemaal naar wens is te ontwerpen: netjes rechtdoor bijvoorbeeld, of spiraliserend. Daardoor is de kunstspier ook nog eens heel compact en licht. Dat maakt het spierconcept heel geschikt voor toepassingen waarbij een robot draagbaar moet zijn of zelfs op het lichaam wordt gedragen.
Verder is voor de aansturing van deze spieren geen ingewikkelde elektronica nodig; dat scheelt weer in de complexiteit van de hele robot. ‘Doordat de intelligentie is voorgeprogrammeerd in de materialen en het ontwerp, kunnen de algoritmes om de hele robot aan te sturen veel simpeler blijven. Alle actuatoren hebben een eenvoudige aan/uit-schakeling, die wordt vertaald in uiteenlopende bewegingen’, aldus Rus.
Bekijk wat verschillende voorbeelden van de kunstmatige spieren:
Sterk
Volgens de onderzoekers zijn sommige van hun kunstspieren sterker dan menselijk spierweefsel. Per oppervlakte-eenheid genereert de kunstspier zes keer meer kracht, wat wordt gedemonstreerd door een 2,6 g wegend ‘spiertje’ dat 3 kg aan gewichten optilt (zie video hierboven).
Aan de andere kant zijn er kunstspieren die heel gevoelig een bloem kunnen optillen. Een dergelijk fingerspitzengefühl is al langere tijd een uitdaging in de robotwereld. Immers, veel producten zijn zacht en dus kwetsbaar voor te harde knijpbewegingen. Denk aan fruit, groenten of eieren.
Schaalbaar
De kunstmatige spieren zijn goed schaalbaar, zo hebben de onderzoekers laten zien met versies van een paar millimeter tot een meter groot. Dit betekent dat het concept gebruikt zou kunnen worden bij heel verschillende toepasingen; van kleine apparaatjes in de operatiekamer tot draagbare exoskeletten (lees: ‘Delfts exoskelet neemt alle hindernissen’) en zelfs opblaasbare gebouwen.
Een bijkomend voordeel van het systeem dat werkt op vacuüm, is de veiligheid. Als er een conventionele robot op tilt slaat, kun je als mens maar beter dekking zoeken. Als de spieren op vacuüm kapot gaan, zullen er nooit stukken in het rond vliegen.
De details van dit onderzoek staan beschreven in een recent artikel in vaktijdschrift PNAS.
Beeldmateriaal Shuguang Li / Wyss Institute, Harvard University







Reacties