


Origami-robots rollen uit
Uitrolbare systemen die daarbij ook nog stijf en sterk genoeg zijn om gewichten te tillen, zijn lastig te ontwerpen. Zuid-Koreaanse onderzoekers bedachten een speciale origamistructuur, waarmee dat wel kan.
Eureka is de rubriek voor 'productontwerpen voor morgen' uit De Ingenieur.
Vaak is het handig als gebruiksvoorwerpen oprolbaar zijn. Wanneer ze gemaakt zijn van flexibele materialen, zoals bij een elektriciteitskabel of meetlint, is dat geen grote uitdaging. Maar wat als het voorwerp in uitgerolde staat onbuigzaam en stevig moet zijn, zoals wenselijk is voor de armen van een robot?
Robotica
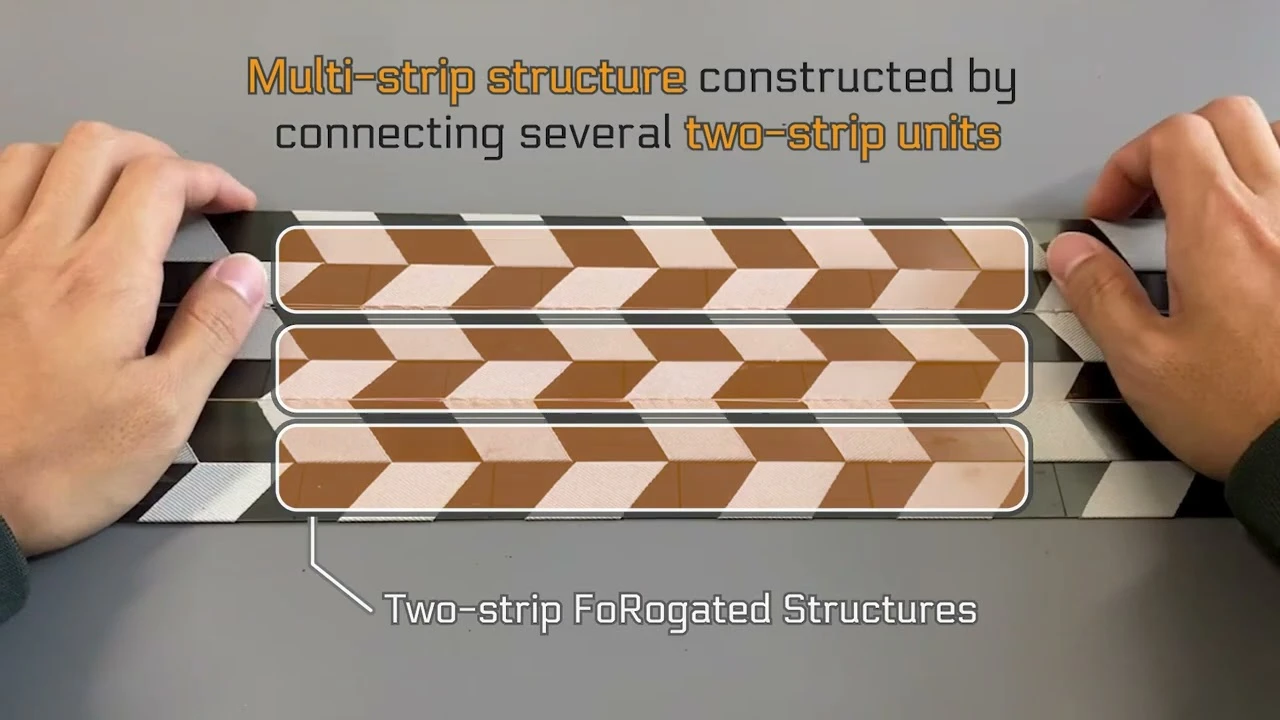
Wetenschappers van het biorobotica-lab van de Seoul National University bedachten hier iets op. Zij ontwierpen oprolbare robotarmen van bijna twee meter lang, die stevig genoeg zijn om in horizontale positie een gewicht van vijfhonderd gram te dragen. De ledematen hebben een waaiervormige structuur: ze bestaan uit naast elkaar geplaatste metalen strips, die met een breed lint aan elkaar zijn gevlochten. Aan dit origami-achtige vlechtwerk ontlenen ze hun sterkte. De metalen strips kunnen binnen de gevlochten linten heen en weer bewegen. Het geheel kan daardoor in de breedte in een zigzag-vorm worden opgevouwen en daarna in de lengte worden opgerold. Hoe sterk of juist flexibel de robotarmen zijn, kunnen de ontwerpers bepalen met de exacte keuze van het materiaal.
Demonstratie
Tot nu toe hebben de onderzoekers de oprolbare armen in twee apparaten toegepast. Het eerste is een robot, formaat stofzuiger, die met zijn langgerekte armen spullen op grote hoogte kan pakken of verplaatsen. Het andere is een tetraëder-vormig frame, met een basis van ruim drie bij drie meter en een hoogte van 2,5 meter, waaraan in het midden iets zwaars kan hangen. Ter demonstratie hingen de ontwerpers een 3D-printapparaat in dit frame, dat daar al hangend een raket printte.
Foto: SNU Biorobotics laboratory







Reacties