

Zachte robot beweegt dankzij ventiel ketchupfles
Hoe laat je zachte robots zonder computerbesturing bewegen en reageren op hun omgeving? Onder andere met behulp van een slim ontworpen drukventiel, geïnspireerd op een fles ketchup, zo laten onderzoekers van AMOLF en de TU Eindhoven zien.
Lang niet iedereen zal het beseffen tijdens het bereiden van een broodje hamburger, maar het sluitmechanisme van de ketchupfles is een wonder van techniek. Staat de fles op zijn kop, dan blijft dat ventiel gesloten. Maar knijp je in de fles, dan spuit er ineens een ferme straal ketchup uit. Onderstaande video laat dit mooi zien.
Wat hier gebeurt is dat het ventiel ‘plop-open’ doet, en even later ineens weer ‘plop-dicht’. Net zoals je een halve tennisbal kunt omklappen, een instabiele toestand waarin hij ineens weer kan terugklappen.
‘Dat ventiel vertoont niet-lineair gedrag. Gedrag dat je in de techniek meestal wil vermijden’, zegt Luuk van Laake, promovendus bij AMOLF en eerste auteur van een artikel in het vakblad Matter, dat afgelopen vrijdag, 8 juli, verscheen. ‘Neem de kolommen waarop een gebouw rust, die mogen niet ineens gaan knikken. Maar wij benutten dit gedrag hier juist.’
Beweging van robot programmeren
Wie beter naar de ketchupfles kijkt, ziet dat aan het eind van een kneep de straal saus begint te sputteren. ‘Op dat moment gaat het ventiel heel snel achter elkaar open-dicht-open-dicht’, zegt Van Laake. ‘Dat effect hebben wij benut voor het programmeren van beweging in een robot. We hebben een eigen ventiel ontworpen, dat opengaat bij precies de juiste hoge druk en sluit bij lage druk.’
De onderzoekers maakten hun ventiel (zie de foto bovenaan) door siliconenrubber in een nauwkeurig 3D-geprinte mal te gieten. Met een laser sneden ze daarin vervolgens een kleine inkeping. Zo ontstaat een ventiel dat normaal dicht is, opeens opengaat als de druk hoog genoeg is, en pas weer sluit als de druk een stuk is gezakt.
Kunstmatige spier
Door het ventiel aan te sluiten op een pomp en reservoir, ontstaat vanzelf een ritme van druk opbouwen en lucht doorlaten, waarmee een kunstmatige spier afwisselend wordt opgepompt en ontspannen. Als je nu meerdere ventielen en spieren tegelijk aansluit, bewegen ze om en om, in een volgorde die de onderzoekers kunnen bepalen. Dat is het beste te illustreren met een reeks foto’s:
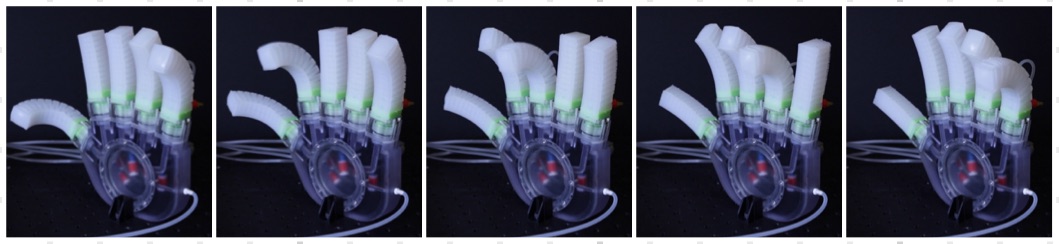
Alle vijf de vingers hebben hier dezelfde eigenschappen. Ze bewegen na elkaar. De luchtdruk gaat omhoog en de vinger buigt. Langzaam stroomt de lucht weer weg door een vernauwing en de vinger strekt zich. Dit patroon blijft zich oneindig herhalen.
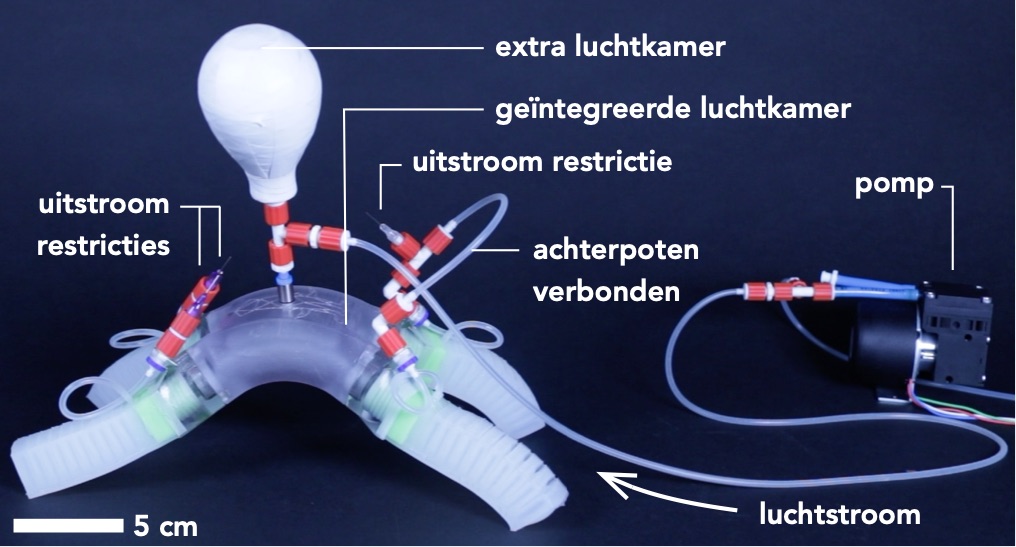
Een tweede demonstratie gaven de onderzoekers met een eenvoudige looprobot. ‘Zijn voorpoten bewegen om en om, terwijl de achterpoten een lagere frequentie hebben’, vertelt Van Laake.
Zachte robots
Dit onderzoek dient uiteindelijk voor het maken van zachte robots (het onderzoeksveld heet ‘soft robotics’), robots die er heel anders uitzien dan de harde, rigide robots die we kennen. Dat is nodig op plekken waar robots bijvoorbeeld voortdurend moeten omgaan met mensen, zoals in de zorg.
Deze robots zijn zacht, maar dankzij de huidige vinding kunnen ze ook zonder aansturing van buitenaf reageren op veranderingen in hun omgeving. ‘Wij willen robots maken zonder centrale computer, die kunnen bewegen en reageren op hun omgeving dankzij ingebouwde reflexen in het robotlichaam’, zegt Bas Overvelde, hoofd van AMOLF's onderzoeksgroep naar Soft Robotic Matter en universitair hoofddocent aan de TU Eindhoven.
Geen brein
In zo’n zachte robot zit dus geen centrale aansturing, geen brein. Hoe weet-ie dan wat hij moet doen? ‘Bij een robot zijn er altijd drie aspecten die bijdragen aan het gewenste gedrag: lichaam, brein en de omgeving. Nu het brein er niet is, moeten we het robotlichaam en de omgeving zo ontwerpen dat de robot doet wat we willen’, legt Van Laake uit.
Paprika's
De bekendste toepassing van soft robotics is te vinden in de tuinbouw en de voedingsindustrie. Daar worden zachte grijpers gebruikt die tomaten en paprika’s vastpakken zonder ze te beschadigen. ‘Die vruchten hebben steeds een net andere vorm, daar heb je wel een zachte grijper bij nodig’, aldus Van Laake.
Kunsthart
Het onderzoek aan het op de ketchupfles gebaseerde ventiel gaat door. Zo willen Overvelde en collega’s het ventiel gebruiken in het Europese project Hybrid Heart, waarin ze een kunsthart proberen te bouwen. Net als in een echt hart zal hierbij geen volledig centrale aansturing zijn; het hart zal met een bepaalde frequentie gaan kloppen door zijn vorm en de materialen waar het van is gemaakt.
Van Laake: ‘We denken nu te weten hoe we het hart kunnen laten pulseren met behulp van ons nieuwe ventiel. Maar hoe reageert het op veranderingen in het lichaam? Daar zijn we naar op zoek: hoe laat je een kunsthart kloppen?’
Foto's en illustraties: Van Laake et al., Matter, 2022







Reacties