Microrobot flappert door water en lucht
Het microrobotje kan vanuit de lucht in het water vallen, daar rondzwemmen, en vervolgens weer uit het water opstijgen. Die lucht-waterovergang is heel bijzonder voor een kunstvlieg die minder dan een vijfde gram weegt.
Microrobots hebben als voordeel dat ze makkelijk door kleine ruimten bewegen en kunnen dienen als mobiele sensor. In Nederland werkt bijvoorbeeld Delfly van de TU Delft aan microrobots die in de lucht allerhande kunsten vertonen.
175 microgram
Valt zo’n kunstvlieg in het water, dan is hij reddeloos verloren. Het zou dus mooi zijn als er een kunstvlieg is die wel tegen water kan. Bovendien zijn er taken denkbaar waarbij het nuttig is om met zo’n microrobot zowel in als boven het water metingen te doen. Die microrobot moet dan dus zowel in de lucht kunnen vliegen, in het water zwemmen, en ook nog eens de grenslaag tussen lucht en water passeren. Dat laatste lijkt triviaal, maar is het zeker niet. Want met een gewicht van 175 microgram is het helemaal niet zo eenvoudig om de oppervlaktespanning van het water te doorbreken of uit het water omhoog te komen.
Ingenieurs van toonaangevende universiteiten als Harvard (Cambridge), Imperial College (Londen), University of California (San Diego) en Hongkong hebben nu een kunstvlieg gemaakt die de beide media water en lucht wel aankan. Ze publiceren er vandaag over in Science Robotics.
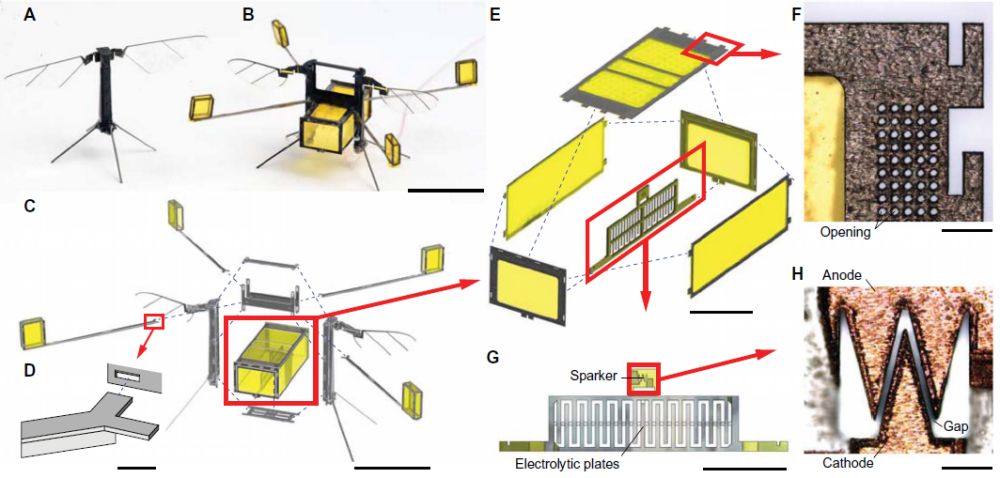
Voor de voortbeweging en om in de lucht te blijven is de microrobot uitgerust met flapperende vleugels, een bij kunstvliegen gebruikelijke techniek. De vleugels worden ook gebruikt om onder water voort te bewegen. Ze flapperen dan veel langzamer, slechts 9 keer per seconde, terwijl dat in de lucht 220 tot 300 keer per seconde is.
Om vanuit de lucht het water in te gaan moet de kunstvlieg de oppervlaktespanning van het water doorbreken. Dat lukt alleen wanneer de microrobot schuin, loodrecht of omgekeerd op het water terecht komt. Met die posities is het oppervlak van de kunstvlieg dat bij de landing gelijktijdig het water raakt klein genoeg om de oppervlaktespanning te doorbreken.
Weer uit het water opstijgen is gecompliceerder. Om dat te kunnen doen is het robotje uitgerust met een klein waterstoffabriekje: een mini-elektrolyseerapparaat en een ontstekertje dat elektriciteit levert. Met die beide zet het robotje water om in zuurstof en waterstof, beide gassen. Die worden opgevangen in het gaskamertje van de robot en via kanaaltjes uitgestoten. Dat gebeurt met een kracht die voldoende is om het robotje een lanceersnelheid van een kleine 2 m/s te geven, zodat het vervolgens weer op zijn flappervleugels verder kan vliegen.

De microrobot signaleert de overgang tussen lucht en water met zijn eigen sensoren. In de experimentele opstelling is hij nog wel via een draad verbonden met een externe computer die zorgt voor de bewegingsfeedback tijdens het vliegen. Die feedback is nodig om de kunstvlieg stabiel te houden. Uiteindelijk zal de kunstvlieg zelf een microcomputer krijgen.
Muggen volgen
Het onderzoek is voornamelijk experimenteel, al kan onderzoeksleider Yufeng Chen zich wel enkele toepassingen voorstellen, aldus het interview dat Science Robotics publiceerde. Chen noemt onder andere het meten van de waterkwaliteit van vijver naar vijver, of het achtervolgen van bepaalde insecten die op het grensvlak van water en lucht leven, bijvoorbeeld muggen(larven).
Op de video's hieronder zijn verschillende bewegingen van de microrobot te zien.
Opstijgen uit het water:
Opstijgen en landen: