
De zelfrijdende Google
De verwachting is dat over vijf jaar de eerste autonome auto’s op de snelweg rijden. Wie in zo’n auto zit, moet niet verwachten dat hij in een noodsituatie nog iets zinvols kan doen. ‘Laat de optie dat de bestuurder zelf kan ingrijpen los. Het voertuig moet zelf in staat zijn een veilige noodstop te maken.’ (Frank Biesboer)

De Google selfdrive op een testcircuit.
Stel je een situatie voor waarin een auto op de snelweg plotseling wordt geconfronteerd met een scharende vrachtwagen. En stel dat die auto op dat moment autonoom rijdt, zonder bemoeienis van de bestuurder die bezig is zijn e-mail te lezen. Is het dan reëel dat de auto de bestuurder met knipperlichten en geluiden maant het stuur over te nemen om de situatie weer meester te worden?
‘Vergeet het maar’, zegt prof.Dr.-Ing. Pim van der Jagt, directeur van het Ford Research Centrum in Aken en een van de keynotesprekers tijdens het congres van FISITA, de wereldfederatie van auto-ingenieurs, dat begin juni in Maastricht werd georganiseerd door het Koninklijk Instituut Van Ingenieur (KIVI). ‘Nadat de bestuurder van de schrik is bekomen dat hij moet gaan rijden, heeft hij tijd nodig om de situatie om zich heen tot zich door te laten dringen en dan ook nog een geschikte handeling bedenken om een botsing te voorkomen. Tegen die tijd heeft de crash allang plaatsgevonden. De auto zal dus zelf in staat moeten zijn om zich uit de situatie te redden en het voertuig veilig stil te zetten.’
Autonoom rijden was een hot topic bij de auto-ingenieurs en zelfs Google was erbij om te vertellen over zijn pas uitgekomen zelfsturende auto, de eivormige tweezitter zonder stuur of voetpedalen en met slechts een rode knop voor een noodstop. ‘Wij laten het schemergebied tussen waar de bestuurder nog wel kan ingrijpen en waar dat niet meer kan voor wat het is en hebben met onze zelfsturende auto de ultieme stap gezet: er is geen bestuurder meer’, zegt Chris Urmson, leider van het Google Self-Driving Car Program en als hoogleraar verbonden aan het Robotics Institute van de Amerikaanse Carnegie Mellon University.
Google en Ford vertegenwoordigen ieder met hun eigen wijze van buitenspel zetten van de bestuurder een duidelijk ander geluid dan autofabrikanten als Volvo en Toyota, die juist technologie ontwikkelen die de alertheid van de bestuurder centraal stelt, bijvoorbeeld door het volgen van de oogbeweging of het meten van de hersenactiviteit. Zolang de bestuurder aan zet is, kan dit inderdaad helpen voorkomen dat zijn aandacht op de weg verslapt, maar beide fabrikanten zien die techniek vooral ook als opstap naar een meer autonoom rijdende auto die op een gegeven moment de bestuurder wil inschakelen. ‘Laat die optie los’, zegt Van der Jagt met nadruk. Om praktische redenen, het werkt gewoon niet, maar ook vanuit de behoefte van de bestuurder-die-niet-bestuurt. ‘Waarom zou iemand tienduizend euro extra gaan uitgeven voor een autonoom rijdende auto als die auto hem om de tien of twintig seconden lastig valt met een alertsignaal? Die eigenaar wil onderweg juist niet bezig zijn met autorijden.’
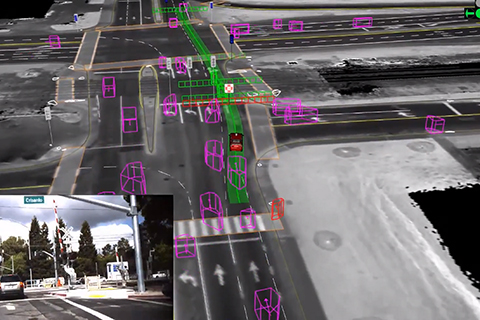
Zo ziet de zelfrijdende Google zijn omgeving. De groene strook is de anticipatie van zijn route.
Dat laatste is een van de drijfveren achter het autonome rijden: het dient het gemak en comfort van de consument. Maar er zijn meer motieven. Van alle dodelijke ongelukken in het verkeer is het overgrote deel toe te schrijven aan menselijke falen, deels door gebrek aan concentratie, vermoeidheid en dergelijke – waar die awareness-systemen kunnen helpen – deels door een verkeerde inschatting van de verkeerssituatie. En hoewel geen van de FISITA-sprekers dat met ervaringscijfers kan aantonen, is iedereen ervan overtuigd dat een autonoom rijdende auto minder ongelukken zal veroorzaken. ‘Met een cruisecontrol die ook op de afstand tot de voorligger let, de adaptive cruise control, kan het bijvoorbeeld niet gebeuren dat een vrachtwagen op een stilstaande file inrijdt’, geeft Van der Jagt aan. Verder heeft de zelfrijdende auto een meer anticiperende rijstijl, wat volgens sommige berekeningen een brandstofbesparing van 20 % oplevert.
Urmson gaf de aanwezigen een vluchtige blik in de self-drive keuken van Google. Een van de cruciale bestanddelen van het autonoom rijden is dat de auto weet waar hij zich bevindt. Dat gebeurt niet met gps, dat veel te onbetrouwbaar en onnauwkeurig is, maar met laser imaging in combinatie met een gedetailleerde kaart, die samen zorgen voor een plaatsnauwkeurigheid tot minder dan 10 cm. Verder moet de auto andere verkeersdeelnemers herkennen en bijvoorbeeld ook wegafzettingen of stoptekens van een verkeersregelaar. Behalve al deze locatiegegevens is kennis nodig van wat er gaat gebeuren, waarbij de auto zelf ook inschattingen maakt. Als bijvoorbeeld rechts naast de Google-auto een bestelbus rijdt en verderop is de rechterrijbaan afgezet, dan zal de Google-auto erop anticiperen dat de bestelbus naar de rijbaan van de auto komt en voorrang verlenen. Of wanneer direct achter de spoorwegovergang auto’s stilstaan, dan zal de Google-auto niet op de spoorrails stoppen, maar ervoor, tot er vrije doortocht is.
Van der Jagt heeft best bewondering voor de prestaties van Google. ‘Ze hebben het autonoom rijden een enorme push gegeven. Indertijd, in 2007, deed Ford ook mee aan wedstrijd van het Amerikaanse ministerie van Defensie om autonoom in de woestijn te rijden – wat wordt gezien als het startpunt van het autonome rijden. Maar wij hebben het sindsdien laten liggen, omdat we nooit hadden verwacht dat het zo snel zou gaan en omdat we de expertise nodig hadden op ander terrein.’ Nu is dat duidelijk anders. ‘Ik denk dat over vijf jaar de eerste modellen beschikbaar zijn voor autonoom rijden op de snelweg. De techniek is er en onderdelen ervan, zoals adaptive cruise control, zitten al in onze modellen. Het zijn eerder zaken als regelgeving, keuringen en dergelijke die het tijdspad bepalen.’
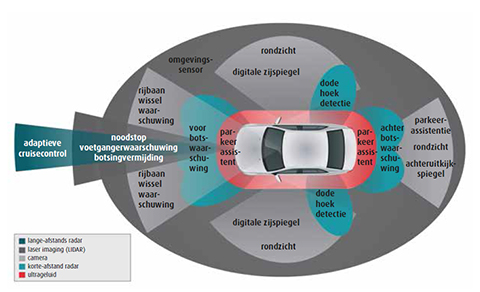
De sensoren en radars van een zelfrijdende auto.
Autonoom rijden heeft volgens Van der Jagt consequenties voor de architectuur van de auto. ‘De onderdelen die het meest essentieel zijn voor veiligheid, de rem en de besturing, moeten redundant, met twee volledig gescheiden systemen worden uitgevoerd. De voortstuwing moet ook blijven functioneren – je wilt niet midden op een snelweg stil blijven staan – maar de eisen daaraan zijn minder stringent. Uiteindelijk gaat het erom dat als het systeem faalt, de auto veilig tot stilstand komt.’ Voor dat systeemfalen werkt het onderzoeksinstituut in Aken met verschillende scenario’s, zoals het plotseling uitvallen van het sturen. ‘Met selectief remmen kunnen wij eenzelfde manoeuvreervrijheid bereiken.’ Iets van die techniek past Ford met de zogeheten Torque Vectoring by Brake al in sommige van zijn modellen toe.
Belangrijk is ook de wisselwerking tussen de auto en de niet-rijdende bestuurder. ‘Sommigen zullen alleen willen weten wanneer de auto vlak bij de ingesproken bestemming is, anderen willen meer informatie over de status van de verschillende systemen. Het betekent dat de aangeboden informatie aangepast moet kunnen worden aan de behoeften van de eigenaar, zonder dat iemand ingewikkelde menu’s hoeft te doorlopen.’ Wat ook speelt, is het verwachtingspatroon waarmee de bestuurder in zijn auto stapt. ‘Rijdt zijn wagen een vaste route en wijkt die er plotseling van af, dan wil de bestuurder weten waarom dat zo is.’
Tijdens zijn lezing kreeg Van der Jagt een tweetal intrigerende vragen voorgelegd. Als de bestuurder geen rol meer heeft, neemt Ford dan de verantwoordelijkheid bij een ongeluk? Van der Jagt is stellig: ‘Een auto komt alleen op de weg als die voldoet aan de eisen. Die keuringen gaan dus ook over het besturingssysteem, de software, de beveiliging enzovoorts. Op het moment dat onze auto aan al die eisen voldoet, is degene die hem koopt of gebruikt verantwoordelijk. Dat hoort bij jouw keuze om zo’n autonome auto te gebruiken.’
De andere vraag is: stel een kind steekt plotseling over en de keuze is dat kind overrijden of tegen een boom aan knallen, wat kiest de autonome auto dan? ‘Ik denk dat die volgt wat de meeste mensen in zo’n situatie van nature doen: proberen het kind te ontwijken. Maar het is een wat vreemde vraag, want weet jij wat je als bestuurder doet wanneer je met zo’n situatie wordt geconfronteerd? Dan denk je niet na, maar reageer je instinctief en dat zal per individu verschillen.’
Een vraag die Van der Jagt meer bezighoudt, is dat de zelfsturende auto weliswaar zal leiden tot aanzienlijk minder verkeersslachtoffers, maar dat er tegelijk een nieuw type ongelukken komt dat we nu niet kennen. ‘Ook al zal de nettobalans wat betreft verkeersslachtoffers zeer positief zijn, de vraag is hoe de samenleving op deze nieuwe aan het autonome rijden gekoppelde ongelukken gaat reageren.’







Reacties