
Drone maakt zich smal
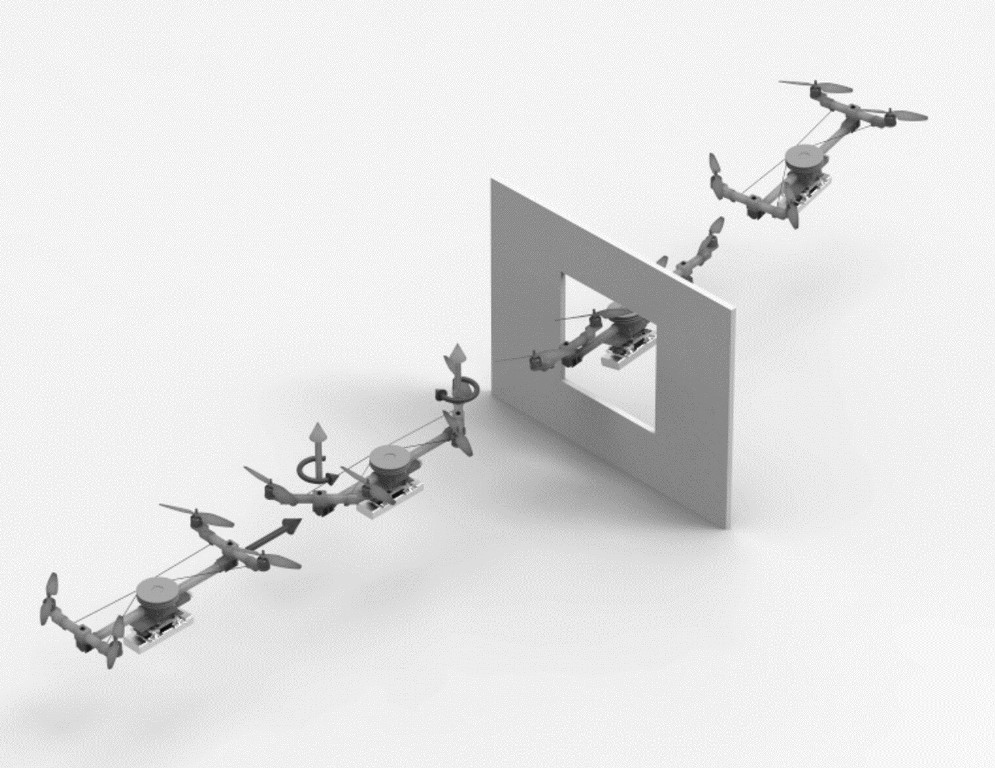
Franse ingenieurs hebben een drone – type quadcopter – gebouwd die zich razendsnel twee keer zo smal kan maken, zodat hij op hoge snelheid door een nauwe opening kan vliegen. De manoeuvre heeft wat weg van vogels die hun vleugels tegen hun lichaam houden om daar een smal gat te vliegen.
De drone heeft vier propellers die op de hoekpunten van een rechthoek zitten. Op deze manier hangt de vliegmachine stabiel in de lucht. Maar deze configuratie maakt hem ook relatief breed. Dat is geen probleem in de vrije ruimte, maar soms komen quadcopters in situaties waar ze door nauwe openingen moeten vliegen. Denk aan de situatie dat een gebouw is ingestort en de drone rondvliegt op zoek naar overlevenden.
Franse ingenieurs van onder meer de Aix Marseille University hebben daar nu een oplossing voor bedacht. Hun quadcoptertje heeft een mechanisme aan boord dat in een fractie van een seconde de balkjes waarop de rotoren zitten, 90 ° draait. Daardoor is de drone veel smaller geworden en past hij door een opening. Meteen hierna floepen de balkjes weer terug in hun oorspronkelijke positie (zie beeld hieronder). De Fransen beschrijven hun vinding in vaktijdschrift Soft Robotics.
Servomotor
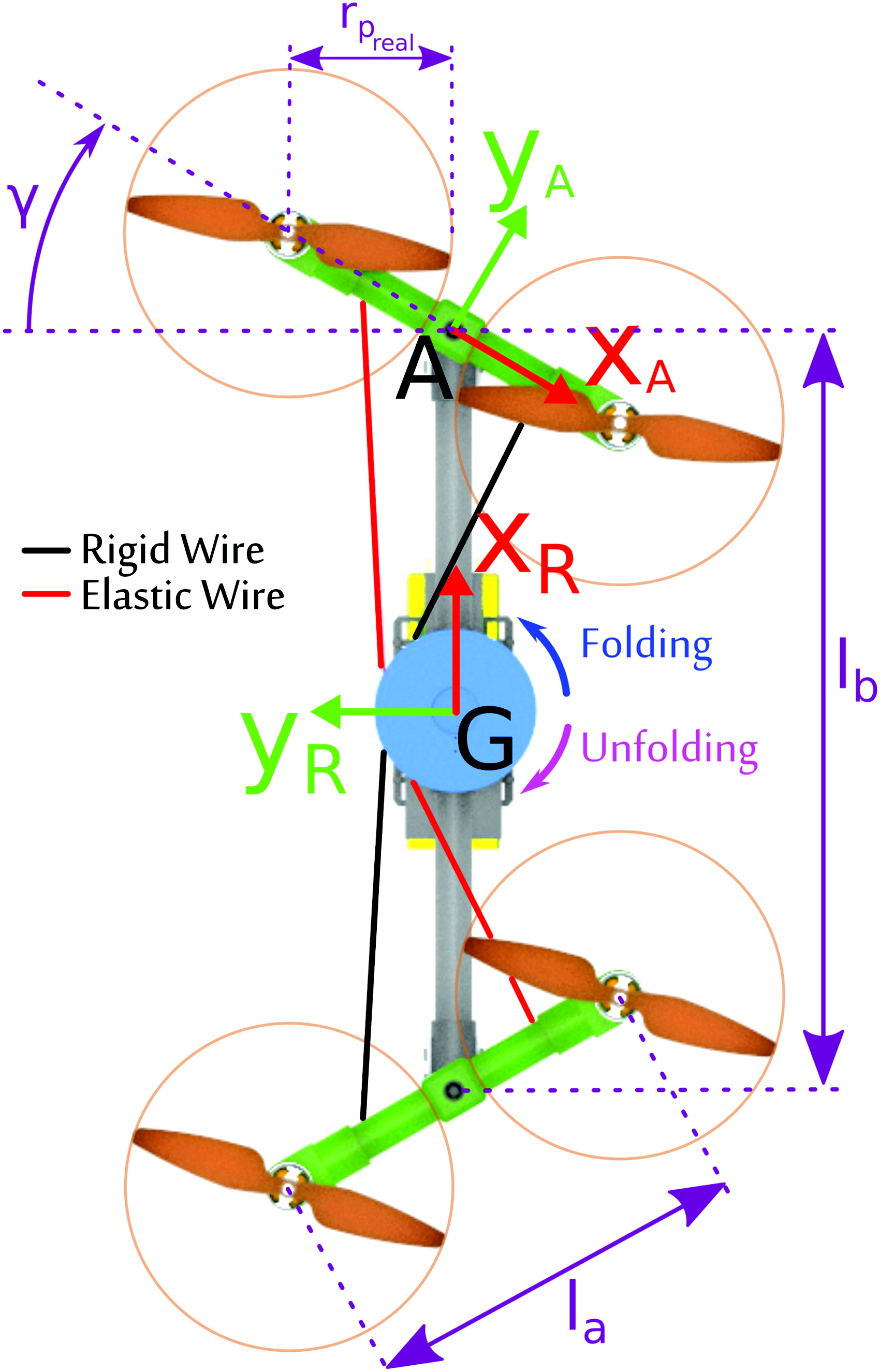 Het mechanisme aan boord draait om een kleine, lichte servomotor waar aan beide zijden zowel een stijve draad als een elastisch draadje vast zit. Detecteert de drone dat er een smalle opening aankomt, dan rolt de servomotor het stijve draadje vliegensvlug op. Hierdoor worden aan beide zijden van het motortje de balkjes gedraaid. Binnen 250 ms is de drone in zijn smalle configuratie terechtgekomen: een breedte van 26,8 cm wordt 12,8 cm (zie figuur).
Het mechanisme aan boord draait om een kleine, lichte servomotor waar aan beide zijden zowel een stijve draad als een elastisch draadje vast zit. Detecteert de drone dat er een smalle opening aankomt, dan rolt de servomotor het stijve draadje vliegensvlug op. Hierdoor worden aan beide zijden van het motortje de balkjes gedraaid. Binnen 250 ms is de drone in zijn smalle configuratie terechtgekomen: een breedte van 26,8 cm wordt 12,8 cm (zie figuur).
Is de drone door de opening, dan draait de servomotor de andere kant op en schieten de balkjes in ruim 300 ms terug naar hun oorspronkelijk positie. Dit moet meteen gebeuren, want met alle vier de rotoren op één lijn heeft de drone flink aan stabiliteit ingeboet. Dankzij allerlei regeltechniek (zie het paper van de Fransen) gaat dit voor korte tijd goed, maar als de drone veilig verder wil vliegen, moeten de rotoren weer in een rechthoek ten opzichte van elkaar gepositioneerd zitten. Bij proeven vloog de drone netjes door een smalle opening met een snelheid van 2,5 m/s.
Verlies van lift
Hoewel dit een slim idee is, hadden de Fransen nog genoeg uitdagingen. Een belangrijke was het feit dat na invouwen de twee binnenste rotoren een overlap hebben. Hierdoor verliest het apparaat een beetje lift, stijgkracht. De controller aan boord corrigeert hiervoor, om te voorkomen dat de drone te veel zakt en alsnog in botsing komt met de onderkant van de opening.
Een tweede probleem bij de ingevouwen toestand is een verlies aan beheersing wat betreft de roll, de rotatie om de as parallel aan de vliegrichting. Tijdens de manoeuvre kan de drone een draaiing tot 15 ° om deze as ondergaan. Uit vervolg onderzoek moet blijken wat hieraan is te doen. De onderzoekers denken bijvoorbeeld aan het onder een hoek plaatsen van de rotoren, zodat daarmee deze draaiing is te corrigeren.
Openingsfoto Valentin Rivière and Stéphane Viollet, Étienne Jules Marey Institute of Movement Sciences (CNRS / Aix-Marseille Université), Overig beeldmateriaal: Riviere et al., Soft Robotics, 2018.
video volgt

More articles




