

Ringen vervangen raderen
Tandwielen zijn te vervangen door ringen. Dat stelt de Amerikaanse ir. Jack Schorsch, die binnenkort promoveert aan de TU Delft op een exoskelet.
Om dat skelet is het hem voorlopig echter niet te doen. Eerst wil hij met de start-up IMSystems de robotindustrie op zijn kop zetten. Met ringen in plaats van tandwielen werkt een robot ruim anderhalf keer zo snel, rekende hij uit. ‘Of je handhaaft de snelheid en reduceert het robotgewicht met 10 %.’
Neem het klassieke onderdeel: drie tandwielen op een rijtje, omsloten door een groot wiel met tandjes. Draait het middelste wieltje met de klok mee, dan draaien de wieltjes aan weerszijden tegen de klok in, en daarmee het grote wiel daaromheen.
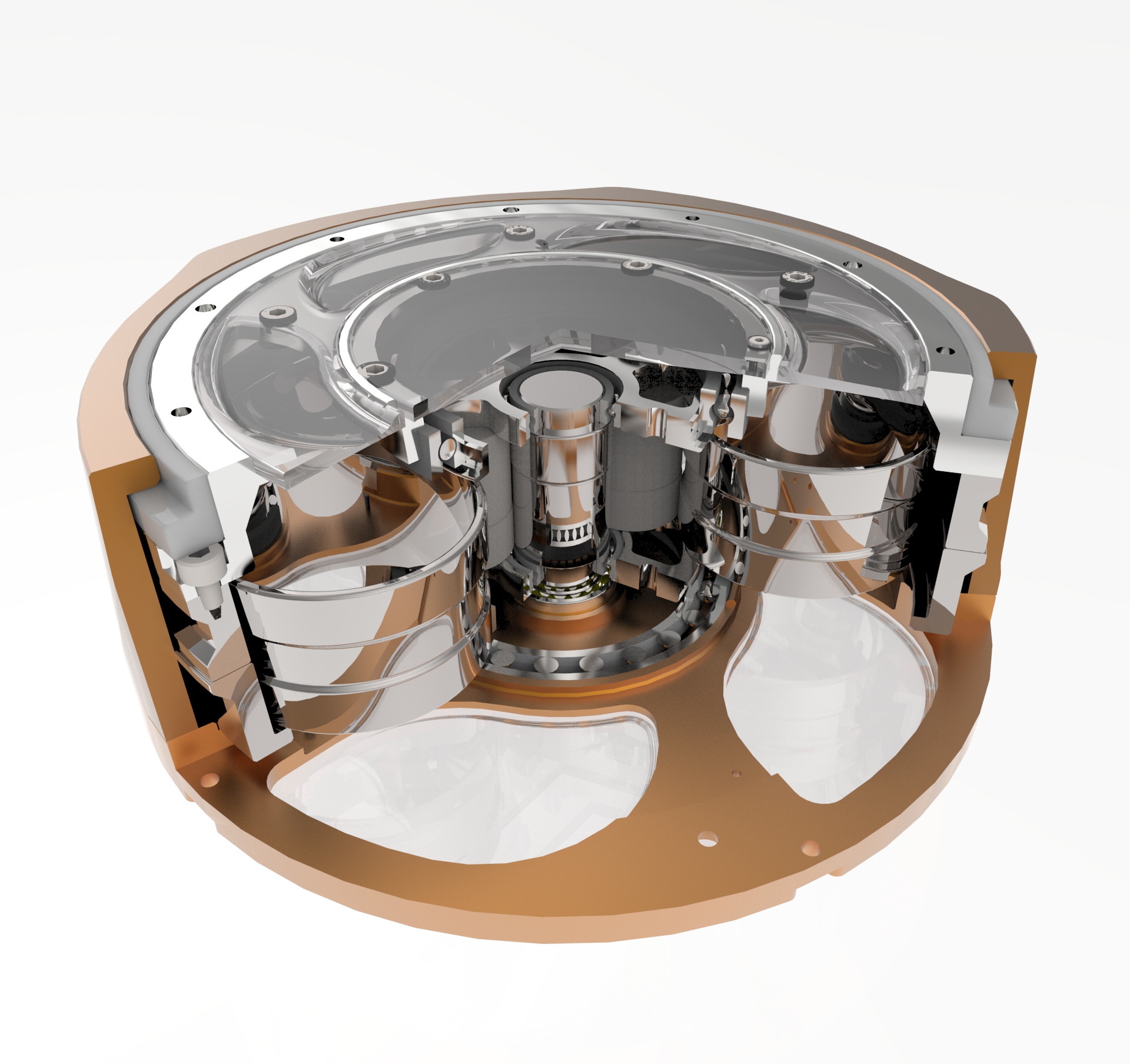 Dit kan ook zonder tandjes, via wrijving, mits de ringen stevig genoeg tegen elkaar aan worden gedrukt. Hoe? ‘Door de grote, omhullende ring nét iets te krap te maken’, aldus Schorsch.
Dit kan ook zonder tandjes, via wrijving, mits de ringen stevig genoeg tegen elkaar aan worden gedrukt. Hoe? ‘Door de grote, omhullende ring nét iets te krap te maken’, aldus Schorsch.
Schorsch gebruikt daarvoor expres geen massieve schijven. Als je die tegen elkaar drukt, is er grote kans op slip, omdat de schijven niet genoeg vervormen; het contactoppervlak is dan gering. Zijn ringen zijn licht verend, het contactoppervlak smeert een klein beetje uit. ‘Dat vergroot de wrijvingskracht aanzienlijk.’
Stoppen
Een van de voordelen is de grote nauwkeurigheid: stoppen is stoppen. Bij tandwielen zit er speling tussen de tandjes, waardoor de boel na afschakelen nog ietsje door draait. Dat is goed nieuws voor de precisie-industrie. ‘De nauwkeurigheid heeft een ordegrootte van 1/3600°.’
Daarnaast maken de ringen kleinere apparaten mogelijk. De huidige tandraderen hebben een grootte van enkele centimeters. Kleiner gaat niet, omdat ze dan de vereiste draaimomentenniet verdragen en de tandjes breken. De ringetjes hebben aan een millimeter genoeg. ‘Tel daarbij op dat ze hol zijn. Zo raak je veel massa kwijt.’ Ringen die even groot zijn als tandwielen leveren een ruim drie keer zo groot draaimoment.

Pilotproject
Schorsch kwam op het idee van de ringetjes door zijn werk bij een Amerikaanse revalidatiekliniek. Daar ontdekte hij dat kleine patiëntjes een kunstarm niet kunnen controleren, omdat de protheses te fors zijn, onder meer door de tandwielen. Als de tijd rijp is, wil Schorsch een ander bedrijf inschakelen om kleinere en lichtere protheses te maken.
Binnenkort start er een pilotproject met een partij in de robotindustrie. Schorsch mag daar nog niets over zeggen. ‘Maar de toepassingen gaan veel verder dan de robotindustrie. Denk aan windmolens, auto’s, ruimtevaartuigen en de huidige exoskeletten.’







Reacties