

Auto kijkt om de hoek om crash te vermijden
Autonome auto's kunnen nu om de hoek kijken om zo eerder te zien of er een andere weggebruiker aankomt. Door schaduwen rond hoeken te interpreteren kan de auto een halve seconde eerder ingrijpen dan een 'gewone' zelfrijdende wagen, claimen de bedenkers.
In parkeergarages, woonwijken of drukke steden bevindt het grootste gevaar voor een bestuurder zich vaak net om de hoek. Voor je het weet komt er uit het niets een fietser, voetganger of andere auto de hoek om scheuren. Langzamer rijden en je ogen de kost geven is de enige oplossing voor het gevaar van de hoek.
Autonome auto's
Autonome auto's hebben het hier lastiger. Ze kunnen immers niet, zoals mensen, hun hoofd naar voren bewegen om beter zicht om de hoek te krijgen. En helemaal stilstaan bij elke bocht of elk kruispunt is onpraktisch. Daarom heeft een autonome auto vaak een LIDAR, een lichtradar die de hele omgeving in detail in kaart brengt. Maar zo'n LIDAR is relatief langzaam; het verwerken van de beelden kost de auto tijd, waardoor hij misschien te laat ingrijpt bij een plotselinge tegenligger van links of rechts. LIDAR is bovendien erg duur.
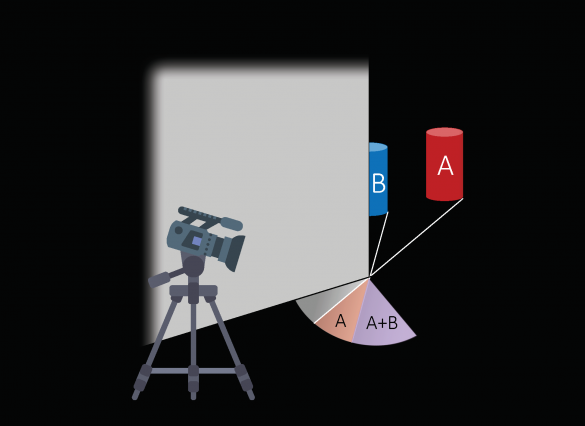
Daarom bedacht het MIT, in samenwerking met Toyota, een nieuwe methode. 'ShadowCam' registreert veranderingen in schaduwen bij hoeken of andere moeilijk zichtbare punten. Het schat daarbij in waar licht vandaan komt en trekt conclusies over de beweging van de eigenaar van de schaduw. Een ingewikkeld proces, dat tot nu toe alleen onder gunstige omstandigheden werkte.
Een beter algoritme
ShadowCam bestaat al twee jaar, maar MIT maakte het algoritme beter en presenteert volgende week op een congres ShadowCam 2.0. Het algoritme kan nu heel kleine, voor het menselijk oog onzichtbare veranderingen waarnemen. Het ziet schaduwen die wij niet kunnen zien, en werkt daardoor ook als het bewolkt is of de zon de verkeerde kant op staat. Ook zijn er geen 'labels' op de omgeving meer nodig. In de vorige versie moesten de onderzoekers van te voren aangeven waar een hoek was, zodat de slimme camera zijn positie nauwkeurig kon bepalen. Dat is nu niet meer nodig, waardoor de techniek kan worden toegepast buiten het laboratorium.
In twee verschillende tests werden nauwkeurigheid van 70 % en 86 % gehaald. Ook was het tot wel 0,7 seconden sneller dan LIDAR. Dat kleine verschil kan grote gevolgen hebben als er plotseling een fietser de hoek om komt. Bij de tweede test, met een auto in een parkeergarage, was het algoritme zo ingesteld dat het perfect werkte in de relatieve duisternis van een garage. Daardoor kon de auto zo goed bewegende schaduwen herkennen. Maar als dit systeem daadwerkelijk in auto's terecht komt, moet het in elke omstandigheid perfect werken. Er is, kortom, nog een lange weg te gaan.







Reacties