Eenvoudige robotjes leren onbewust samenwerken
Een paar eenvoudige, zelflerende robotjes die aan elkaar zijn gekoppeld, beginnen na verloop van tijd een kant op te bewegen. Dat laten onderzoekers bij AMOLF in experimenten zien. Het bijzondere is dat deze beweging niet van bovenaf is opgelegd; de robotjes vogelen de oplossing zelf uit.
De resultaten van het onderzoek staan beschreven in een artikel in het wetenschappelijke tijdschrift PNAS, dat maandag 10 mei verscheen.
Lasrobot
De meeste robots krijgen hun taak van tevoren geprogrammeerd. Neem zo’n oranje lasrobot in een autofabriek: die maakt bewegingen tot op de tiende millimeter nauwkeurig en dat de hele dag door.
Het nadeel daarvan is dat zo’n robot niet kan omgaan met verandering. Komt de carrosserie van een auto-in-wording een keertje per ongeluk een millimeter naar rechts langs, dan zal de las die de robot wil maken, mislukken.

Eenvoudige machientjes
Bij onderzoeksinstituut AMOLF in Amsterdam werken ze aan een heel ander soort robots: eenvoudige machientjes die juist niet zo precies zijn en vooraf maar heel eenvoudige instructies meekrijgen.
Zet je zulke simpele robotjes bij elkaar, dan kan er geheel nieuw en onverwacht gedrag ontstaan, zogeheten ‘emergent gedrag’. ‘Uiteindelijk willen we zelflerende systemen bouwen met simpele bouwstenen, die misschien zelfs alleen maar uit één enkel materiaal bestaan, zoals een polymeer. We noemen dit ook wel robotische materialen’, zegt groepsleider Bas Overvelde van de Soft Robots Matter-groep van AMOLF in een persbericht.
Nieuwsbrief
Vind je dit een leuk artikel? Abonneer je dan gratis op onze wekelijkse nieuwsbrief!
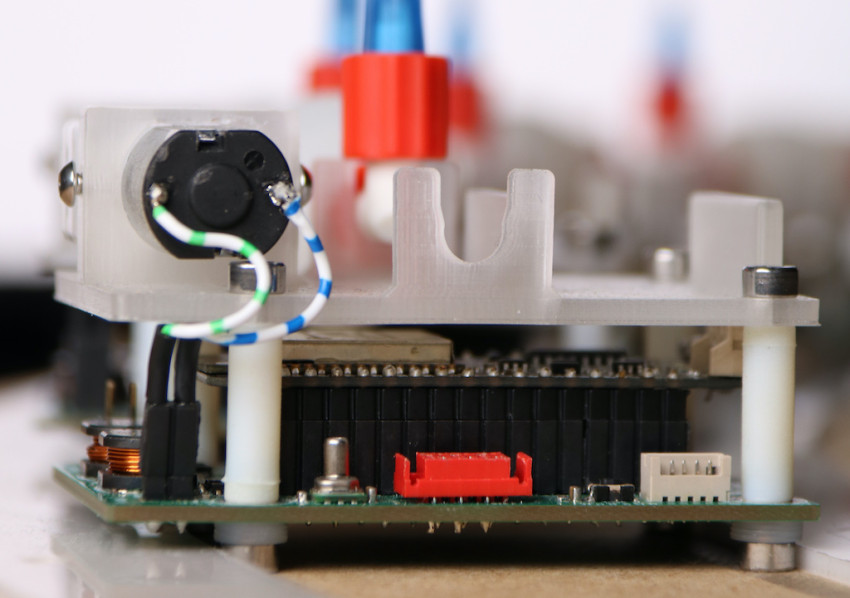
Om meer te leren over robotische materialen, bouwden Overvelde en zijn mensen een paar kleine, identieke robotjes. Elk robotje bestaat slechts uit een microcontroller (een eenvoudig computertje), een bewegingssensor, een pompje dat lucht in een balg pompt en een naaldje om de lucht er weer uit te laten.
Ademende beweging
 Zou een robotje in zijn eentje staan, dan kan hij alleen een beetje lucht inademen en weer uitblazen. Maar maak twee robotjes aan elkaar vast en dan kunnen ze zich door de ademende beweging tegen elkaar afzetten. Een treintje van twee of meer robotjes kan dan gaan ‘rijden’.
Zou een robotje in zijn eentje staan, dan kan hij alleen een beetje lucht inademen en weer uitblazen. Maar maak twee robotjes aan elkaar vast en dan kunnen ze zich door de ademende beweging tegen elkaar afzetten. Een treintje van twee of meer robotjes kan dan gaan ‘rijden’.
‘Om de robotjes zo simpel mogelijk te houden, hebben we gekozen voor een balgje en lucht’, zegt promovendus Luuk van Laake. Het is een beproefde manier om simpele robotjes te maken in het onderzoek naar soft robotics.
Niet communiceren
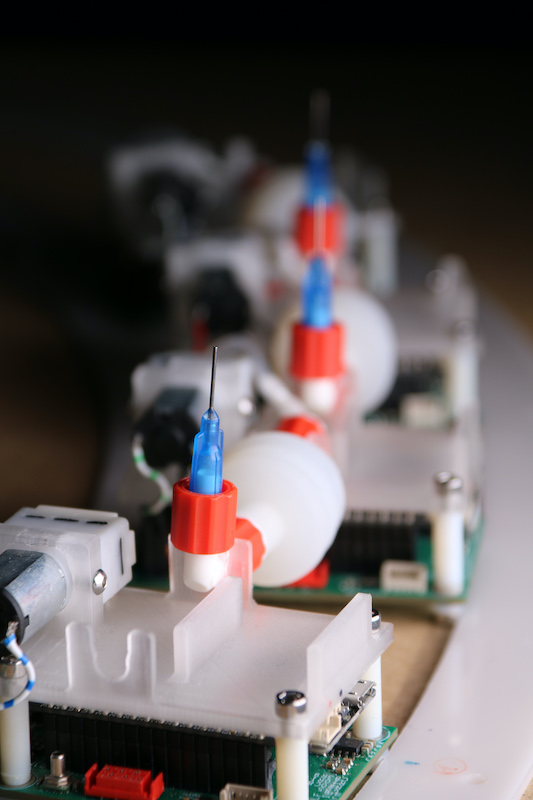
De onderzoekers van AMOLF maakten zeven identieke robotjes aan elkaar vast. Elk robotje kreeg dezelfde eenvoudige opdracht mee: ‘Beweeg zo snel mogelijk een bepaalde kant op’. Alleen – en dit is cruciaal – konden de robotjes niet met elkaar communiceren, het was ieder voor zich.
Het gedrag van een enkel robotje is simpel: het blaast steeds zijn balg op en laat die weer leeglopen, om de paar seconden. Na een paar van deze cycli verandert het robotje een klein beetje (en willekeurig) de fase waarmee het dit doet; het blaast nu een fractie eerder of later de balg op. Vervolgens meet zijn bewegingssensor wat dit voor effect heeft. ‘Geeft dit een beter resultaat dan de eerdere manier, dan houdt hij deze setting vast’, zegt Overvelde.
Treintje begint te lopen
Er zijn dus voortdurend zeven robotjes voor zichzelf aan het uitpuzzelen met welke manier van ‘ademen’ ze zich het meeste blijken te verplaatsen. Al snel mondt dit uit in een collectieve verplaatsing. Het treintje begint te lopen, te zien in deze video:
Robotjes hebben geleerd
De robotjes hebben dus ‘geleerd’ wat de beste instelling is voor hun pompje, maar zonder dat ze met elkaar communiceren en zonder dat vooraf precies geprogrammeerd is hoe ze moeten voortbewegen. Het systeem optimaliseert zichzelf langzaam maar zeker, en dat zonder een lerend neuraal netwerk of een ander centraal systeem van bovenaf.
Golvende beweging
Waar de robotjes met hun pompjes en balgjes maar langs één dimensie kunnen bewegen, zijn Overvelde en zijn mensen al bezig met complexere bewegingen in twee dimensies. ‘We knopen daarbij identieke robotjes aan elkaar in een vlak en willen dat geheel naar het licht laten bewegen.’
En dan ontstaan er fascinerende dingen. ‘Soms begint het geheel te roteren, soms gaat het in een golvende beweging richting het licht. Er kan onverwacht gedrag ontstaan.’
Overstappen op materialen
Nu zijn de AMOLF-onderzoekers nog met fysieke robotjes aan de slag, maar op termijn willen ze voor de uitvoering van hun soft robotics overstappen op materialen. ‘Als het algoritme robuust blijkt te zijn, willen we het in hardware gieten’, zegt Overvelde. De losse, herhalende elementen zijn dan geen robotjes meer.
‘We voeren het systeem dan bijvoorbeeld uit in de vorm van een analoge elektrische schakeling, met weerstandjes en dergelijke, of een microfluïdisch circuit. Misschien kunnen we het gedrag van een repeterend elementje zelfs in het materiaal inprogrammeren. Dat een materiaal van vorm verandert op basis van prikkels in de omgeving, zoals een veranderende temperatuur of licht dat erop valt.’

Bas Overvelde was in 2020 één van de Techniektalenten van De Ingenieur. Lees dit portret dat we toen van hem maakten.
Aanpassen aan veranderende omgeving
Het vakgebied van deze zachte, robotische materialen staat nog in de kinderschoenen. Het grote voordeel van dit soort ‘robots’ is dat de simpele zelflerende robotjes geen ingewikkelde modellen nodig hebben om zich aan een sterk veranderende omgeving aan te passen, heel anders dan de meeste traditionele, geprogrammeerde robots.
‘We denken dit principe in de toekomst in soft robotics te kunnen toepassen. Misschien in de vorm van robothanden die leren hoe ze verschillende objecten kunnen oppakken, of robots die hun gedrag automatisch aanpassen na schade.’
Onderdeeltje stuk
Dat laatste is nog een ander belangrijk verschil met bestaande robots: robotische materialen zijn minder precies dan traditionele robots, maar daardoor robuuster. Gaat er een onderdeeltje stuk, dan blijft het geheel prima functioneren.
Dat bleek al bij het treintje: de onderzoekers maakten moedwillig een robotje stuk, door zijn naald eruit te trekken. ‘De middelste robot kon zich niet meer opblazen, alleen een beetje trillen. Maar tot onze verbazing vond hij een nieuw evenwicht en droeg hij vervolgens net zo goed weer bij aan de beweging van het hele treintje. Dat hadden we niet zien aankomen.’
Beeldmateriaal: Soft Robotic Matter Group, AMOLF.

Meer artikelen