Weer leren lopen

Na een herseninfarct of bij een incomplete dwarslaesie weer leren lopen. Het is een van de mooiste doelen die fysiotherapie kan bereiken, maar wel ten koste van fysiek intensief en zwaar werk. De revalidatierobot Lopes biedt een elegant alternatief. ‘De fysiotherapeut kan nu volstaan met het bedienen van een schuifknop op het beeldscherm.’
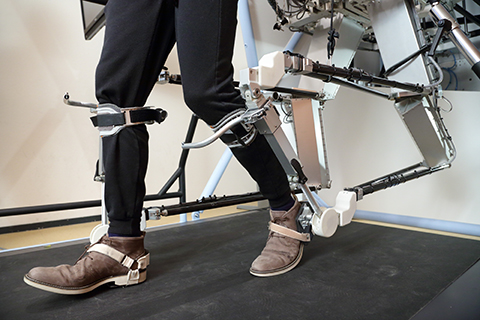
Op het eerst gezicht is het een grotesk apparaat: een flinke huif met een loopband ervoor en binnenin een onnavolgbare verzameling stangen. Ik plaats mijn voet op een plateautje, enkel en kuit worden ingesnoerd, rond de heupen een gordel. Ik begin te lopen met die grote huif vol stangen nog steeds in mijn achterhoofd. Tot mijn verbazing merk ik er nauwelijks iets van, afgezien van wat mechanische geluiden en het gevoel van een klein beetje extra gewicht. Dit is de vrijloopmodus, wordt me uitgelegd. Dan volgt de volledige-ondersteuningsmodus. Het is even leren de spieren los te laten; ik word gelopen, met al naar wens een wat hoger of lager optillen van mijn knie. Alleen wanneer ik bewust met flinke kracht tegenwerk, stuitert het apparaat een beetje. Een kwestie van fijnregeling, krijg ik te horen.
De huifkar met stangen en lopende band is de Lopes II, een revalidatierobot die mensen die zich door een herseninfarct of een incomplete dwarslaesie nauwelijks kunnen voortbewegen, weer helpt te leren lopen. Lopes staat voor Lower Extremity Powered ExoSkeleton – en dat is ook precies wat hij doet: uitwendig extra kracht geven aan de benen. De II in de naam geeft aan dat er ook een eerste Lopes was, toen nog een experimenteel apparaat voor in het lab met alle ongemakken van dien. Van de huidige versie staan er twee in de kliniek: een in het Enschedese Roessingh Revalidatiecentrum en een in de Sint-Maartenskliniek in Nijmegen.
‘Bij het ontwerp van Lopes II ben ik vanaf nul begonnen’, zegt ir. Jos Meuleman, die sinds 2009 namens mechatronicabedrijf Moog het systeemontwerp en de systeemintegratie van de Lopes voor zijn rekening nam. ‘Uiteraard met gebruik van alles wat de eerste Lopes ons heeft geleerd.’ Hij begon met de vraag wat looptraining is. Daarbij kwam het partnerschap met Roessingh en de Sint-Maartenskliniek hem goed van pas kwam. ‘In essentie is het de patiënt de vrijheid geven om weer zelf te bewegen. Je moet dus geen beweging opleggen, maar zorgen voor actieve participatie.’ Hij keek ook hoe dat in de praktijk gaat. ‘Bij zwaar geïnvalideerde patiënten zijn er soms twee of drie fysiotherapeuten nodig, waarbij de ene de patiënt ondersteunt en de andere een been beetpakt om de loopbeweging te stimuleren. Dat is zeer intensief en fysiek inspannend. Bovendien gaat dit bij sommige patiënten gewoonweg niet.’
Die praktijk leverde hem de grondgedachte van Lopes II. ‘De fysiotherapeut pakt met zijn hand een deel van het been en beweegt dat met zijn arm omhoog en naar voren. Dat wilde ik ook, maar dan de arm van de fysiotherapeut vervangen door een stang en diens kracht door een elektromotor.’ Hij brak daarmee ook met het ontwerpprincipe van de oorspronkelijke Lopes, die een exoskelet naast het been had. ‘Dat werkt ook, maar had bijvoorbeeld als nadeel dat het insnoeren van het been nauwkeurig moest gebeuren vanwege het uitlijnen. Dat nam dan al gauw zo’n tien tot twintig minuten in beslag. In de praktijk, met maximaal een uur behandeltijd, werkt dat dus niet.’ Ook hiervoor bood het idee van de stangen uitkomst. ‘Vanwege hun lengte maakt het niet zo heel veel uit waar ze aan het been aangrijpen, dus het insnoeren gaat nu veel sneller, in zo’n vijf minuten.’
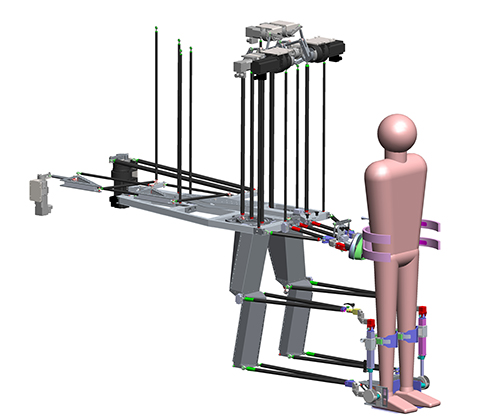
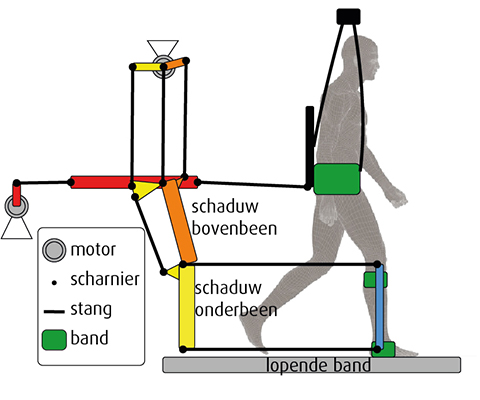
Hoe vervolgens voor elkaar te krijgen dat die stangen de loopbeweging op een natuurlijke wijze tot stand brengen, waarbij ook de heupen iets kunnen draaien? De gouden ingeving was een schaduwbeen, een relatief eenvoudig model met een heupscharnier, bovenbeen, knie en onderbeen. Daar zitten de stangen aan vast die naar de patiënt gaan. Het schaduwbeen wordt aangedreven door stangen die aan de motoren vastzitten, voor elke beweging eentje. ‘Het schaduwbeen kan de beweging tijdens het lopen volledig volgen en actief aansturen.’
Om dit basisidee van het ontwerp te toetsen bouwde Meuleman een testkar, voorzien van schaduwbeen en stangen. ‘Ik heb verschillende behandelaars gevraagd die uit te proberen. Door variatie in onderlinge lengteverhoudingen van de stangen en de scharnierpunten, bereikte ik een configuratie die zo natuurlijk mogelijk aanvoelt.’
De volgende stap was het omzetten van dat basisontwerp in een werkend apparaat. Dat nam het Enschedese mechatronicabedrijf Demcon voor zijn rekening. ‘De grootste puzzel was ervoor te zorgen dat al die stangen elkaar nergens zouden kruisen of in de weg zitten’, zegt ir. Marleen Ruijter, mechatronic system engineer van het bedrijf.
Wat haar collega ir. Rini Zwikker aan het apparaat vooral bekoort, is dat het een rijk palet aan mechanische bewegingsprincipes bevat. ‘Neem het keurig rechtlijnig naar voren en achter bewegen van de beide schaduwbenen, die met vier gekoppelde stangen aan het frame vastzitten. Dat kan alleen als ze bepaalde lengtes hebben volgens het zogeheten Evans-mechanisme.’
Speciale aandacht vroeg het kunnen wegregelen van de massa, zodat volledig vrij lopen mogelijk is, zonder dat de patiënt merkt dat er een hele installatie aan het been hangt. Het resultaat is de nieuwe Lopes, die goed functioneert. Meuleman: ‘In het gebruik zien we wel al kleine verbeterpunten en een volgend model willen we duidelijk compacter bouwen.’
Een mechanisch goed functionerend apparaat levert nog geen looptherapie. Daarvoor werd onderzoeker en systeemontwerper dr.ir. Gijs van Oort van de Universiteit Twente ingeschakeld. ‘Om te beginnen moesten we het looppatroon kennen, waarbij we goed gebruik konden maken van het werk van prof.dr.ir. Herman van der Kooij aan de eerste Lopes en de kennis van de klinische partners. In samenwerking met het Roessingh Revalidatiecentrum hebben we dat looppatroon weten op te delen in meerdere sleutelmomenten per gewricht, zoals het buigen van de knie bij het begin van een stap, dan de strek naar voren en het weer buigen na het plaatsen van de voet. Afhankelijk van de lengte en de snelheid van de loopbeweging definiëren we een gemiddeld looppatroon. Dat is waar Lopes mee begint. Vervolgens is het aan de fysiotherapeut om dat patroon op de patiënt af te stemmen door de beweging van de sleutelmomenten aan te passen. Iedereen loopt op zijn of haar eigen manier, de fysiotherapeut blijft dus nodig om daarop in te spelen.’
De interface van het apparaat zit zo in elkaar dat de fysiotherapeut heel intuïtief het looppatroon kan aanpassen, zoals de hoogte waarmee de voet wordt opgetild, of de grootte van de stap. Daarnaast is de mate waarmee Lopes de loopbeweging ondersteunt gemakkelijk in te stellen met een schuif op de display. ‘Het voordeel van de revalidatierobot is ook dat hij alles monitort. De volgende keer staat het looppatroon van de patiënt gelijk goed. De vorderingen zijn ook direct zichtbaar.’
De twee robots die nu in gebruik zijn, dienen uitdrukkelijk als onderzoekapparaat. Meuleman: ‘Het gaat om de klinische evaluatie, bijvoorbeeld van de nieuw toegevoegde ondersteuning van de balans van de patiënt. Daarnaast doen therapeuten ervaring op door een grote variëteit aan revalidanten in Lopes te laten lopen. Met de feedback van therapeuten en revalidanten kunnen we de robot verder doorontwikkelen voor daadwerkelijke toepassing in de revalidatie. In vervolgonderzoek zal de Lopes-training worden vergeleken met handmatige therapie. Daarnaast zijn er plannen om te onderzoeken wat er gebeurt als iemand die Lopes gebruikt een duw krijgt. Of we brengen op de lopende band objecten aan die de gebruiker moet zien te ontwijken.’
Een onderdeel dat nu nog aan Lopes ontbreekt, is actieve ondersteuning van de beweging van de voet, terwijl die voor het op een natuurlijke manier van lopen essentieel is. ‘We hebben hier al wat ideeën over. Bij Lopes III gaan we deze functionaliteit toevoegen en testen.’

More articles




