Robotvis vindt zijn weg in waterbuizen
Deze robotvis zwemt door zijn vinnen te wapperen en is in staat zelf zijn weg in een met water gevuld buizenstelsel te vinden. Het Duitse bedrijf Festo voegt dit nieuwe exemplaar toe aan zijn biogeïnspireerde robots.
De robotvis ontleent zijn zwembeweging aan soorten als de trilhaarworm en de zeekat, die in het water vooruit gaan door met hun zijvin te wapperen en zo een golfbeweging te creëren die voortstuwende kracht levert. De dieren kunnen met die beweging ook achteruit zwemmen of naar boven of beneden, afhankelijk van de manier waarop ze met hun zijvin wapperen.

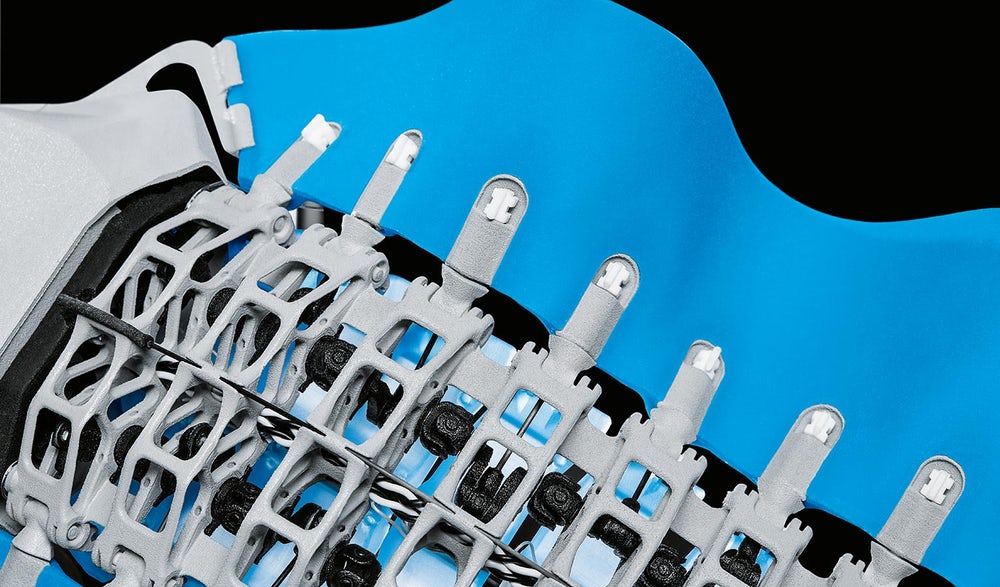
De 3D-geprinte robotvis BionicFinWave van Festo gebruikt dezelfde techniek. Hij heeft aan weerszijden van zijn gesegmenteerde 'ruggengraat' een vin die met behulp van negen eraan bevestigde armen een wapperbeweging kan maken.
De armen worden aangedreven door een tweetal motoren in het hoofd van de vis: elke motor bedient een van beide vinnen. Die kunnen daardoor onafhankelijk van elkaar bewegen zodat de robotvis ook bochten kan nemen. Een derde motor in de vissenkop kan de vorm van de gesegmenteerde 'ruggengraat' aanpassen, waardoor de robotvis omhoog of omlaag kan zwemmen.
In de kop van de 37 cm lange vis zitten ook sensoren. Een voor de waterdruk, zodat de vis weet op welke diepte hij zich bevindt, en een voor watertemperatuur. Een andere sensor met ultrasoon geluid herkent obstakels in het water, zoals de wand van de buis waar hij in zwemt.
De vis kan grote waterleidingen inspecteren of metingen in het water doen. Maar daar is het Festo eigenlijk niet om te doen. Met zijn Bionic Learning Network wil het bedrijf vooral aan de natuur ontleende techniekontwikkeling voor autonome robots bevorderen. Zo ontwikkelde Festo eerder een BionicFlyingFox en een spinachtige BionicWheelBot; zie de video's hieronder.





