
Robot leert zichzelf razendsnel lopen
Amerikaanse ingenieurs zijn erin geslaagd robotpoten te ontwikkelen die zichzelf binnen vijf minuten leren lopen. Nu gaan er nog maanden of zelfs jaren van training aan vooraf voordat robotische ledematen zich kunnen voortbewegen.
De onderzoekers van de Viterbi School of Engineering van de University of South Carolina (USC) vonden hun inspiratie in de natuur. Pasgeboren giraffen of gnoes kunnen al vrijwel meteen na de geboorte op hun poten staan en lopen – cruciaal voor diersoorten die ter wereld komen in een vijandige omgeving waar roofdieren altijd op de loer liggen.
Kunstmatige ledematen
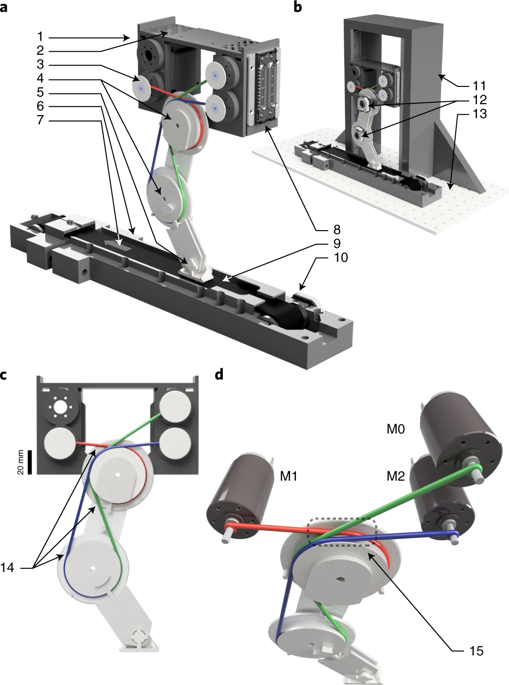
Hoogleraar biomedische technologie Francisco Valero-Cuevas van USC ontwikkelde samen met onderzoeker Ali Marjaninejad een algoritme dat een robot in staat stelt om binnen vijf minuten van ongestructuurd spelen precies te snappen hoe hij zich het beste kan voortbewegen. Vervolgens past hij zich aan de veranderende omstandigheden aan zonder er extra voor te hoeven worden geprogrammmeerd. De robotbenen bestaan uit drie 'pezen' en twee 'gewrichten', net als die van veel diersoorten.
Het onderzoek, waarvan de resultaten in het maartnummer van het tijdschrift Nature Machine Intelligence zijn gepubliceerd, biedt nieuwe inzichten in menselijke voortbeweging. Volgens de makers kan het leiden tot nieuwe prothesen die kunnen reageren op hun omgeving. Dat kan handig zijn voor kunstmatige ledematen voor mensen met een handicap, maar ook robots die voor ruimtevaartmissies worden ontwikkeld of voor ingewikkelde zoekacties kunnen er baat bij hebben.
Motorisch babbelen
De manier van leren is vergelijkbaar met die van baby's, zegt Marjaninejad. De robots leren hun ledematen te gebruiken in een proces dat 'motorisch babbelen' wordt genoemd. 'Deze willekeurige bewegingen van het been stellen de robot in staat om een inwendige kaart te maken van zijn ledematen en hun interacties met de omgeving', zegt Marjaninejad.
De robots leren terwijl ze bezig zijn, benadrukken de onderzoekers. Ze worden niet gevoed door conputersimulaties van wat er allemaal mogelijk is, maar zijn voorzien van een kunstmatig neuraal netwerkje dat kan bijleren. Valt hij om, dan begrijpt hij zelf dat hij weer moet opstaan en verder lopen.
Marjaninejad stelt dat dergelijk vermogen belangrijk is, omdat programmeurs weliswaar veel, maar zeker niet alle mogelijke scenario's kunnen bedenken en meenemen in hun algoritme. Voorgeprogrammeerde robots zijn daarom veelal gedoemd om fouten te maken. 'Maar als je deze nieuwe robots laat leren van hun ervaring, dan zullen ze uiteindelijk een oplossing vinden, die toepassen en waar nodig verbeteren.'
Persoonlijkheid
De robotledematen die in het lab van de USC zijn ontwikkeld, ontwikkelen daarom ook allemaal een andere loopstijl. Zoals je mensen kunt herkennnen aan hun loopje, zo geldt dat ook voor de robots. 'Hun specifieke manier van voortbewegen maakt deel uit van hun persoonlijkheid', zegt Valero-Cuevas.
Het nieuwe algoritme kan onder meer worden toegepast in kunstmatige ledematen. 'Exoskeletten of andere ondersteunende ledematen zijn zo in staat om natuurlijke bewegingen te interpreteren en zich aan te passen aan wat bij de drager past', stelt Valero-Cuevas. 'Onze robots leren voortdurend bij, dus ook van de specifieke bewegingen die een drager nodig heeft om zijn dagelijks leven te leiden.'
Evolutie
Een andere toepassing zien de auteurs in ruimteonderzoek. Daar kunnen robots voortaan zelf aan de slag gaan, zonder precies voorgeprogrammeerd te zijn voor taken en in omstandigheden die onderzoekers op aarde niet goed kunnen voorzien.
'Het vermogen van soorten om te leren en hun bewegingen aan te passen terwijl hun lichaam en hun leefwereld veranderen, is een belangrijke, stuwende kracht achter de evolutie', zegt Brian Cohn, een student die ook bij het onderzoek betrokken was. 'Ons werk helpt robots op weg om ook te leren van elke ervaring, net zoals dieren dat doen.'
Foto: Matthew Lin





