
Flapperende robot verklaart zwenkgedrag fruitvlieg
Een robot met flapperende vleugels is gebruikt om te begrijpen hoe een fruitvlieg in staat is om tijdens zijn vlucht plots een scherpe bocht te maken.
Het onderzoek met de robot is van ingenieurs uit Delft en Wageningen, die daarover morgen publiceren in het wetenschappelijke tijdschrift Science.
De belangrijkste conclusie van het onderzoek is dat de fruitvlieg die scherpe bocht niet maakt door bijvoorbeeld met zijn linkervleugel veel harder te gaan dan zijn rechter, want dan lukt het nooit snel genoeg de hoek om te gaan. Sterker, hij doet dat juist niet. In plaats daarvan draait hij zijn lichaam bij het nemen van een bocht om de beide andere assen, waardoor het lichaam draait en de vlieg vervolgens zijn vlucht in de nieuwe richting hervat. ‘Met onze robot hebben we dit mechanisme kunnen achterhalen’, zegt postdoc-onderzoeker Matěj Karásek van de TU Delft.
Hij draait zijn lichaam
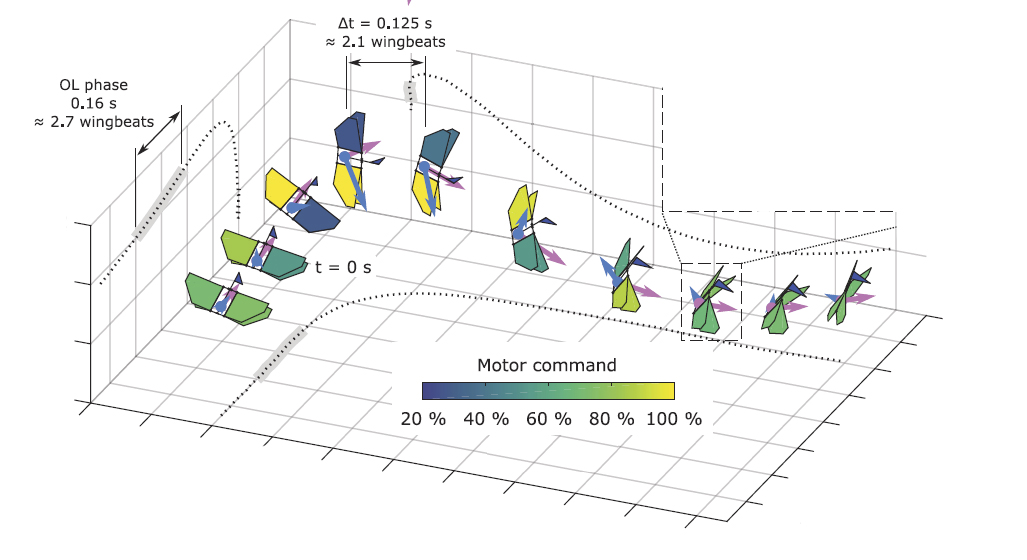
De crux is dat de aandrijving niet gebeurt op de as waaromheen de vlieg zijn scherpe bocht wil maken, maar juist op de beide andere assen, Dus terwijl hij zijn spieren gebruikt om om zijn as te draaien en te hellen, is het resulterende effect dat hij om zijn derde as draait en de bocht om gaat. 'De fruitvlieg doet dit ook, maar daarvan wisten biologen niet of het expres was. Van de robot weten we zeker dat dit niet expres is. Het is een aerodynamisch effect dat de fruitvlieg weet te benutten,' zegt Karásek.
Vlieggedrag lijkt in alles op dat van de fruitvlieg
Nu lijkt de flapperrobot in vrijwel niets op een fruitvlieg. Hoe weten de ingenieurs dan zo zeker dat dit mechanisme ook voor de fruitvlieg geldt? ‘Met filmopnamen zien we een zelfde soort beweging. En alle variaties die we in het vliegschema van de robot aanbrengen zien we op een soortgelijke manier terug bij de fruitvlieg.’
Volgens Karásek toont het onderzoek aan dat een robotmodel goed kan worden gebruikt om verschijnselen uit de natuur te verklaren. ‘Van de robot weten we precies wat hij doet, de data in zijn ‘hersenen’ zijn voor ons volledig toegankelijk. Met een vliegende fruitvlieg lukt dat niet.’
Hoe vliegt de robot?
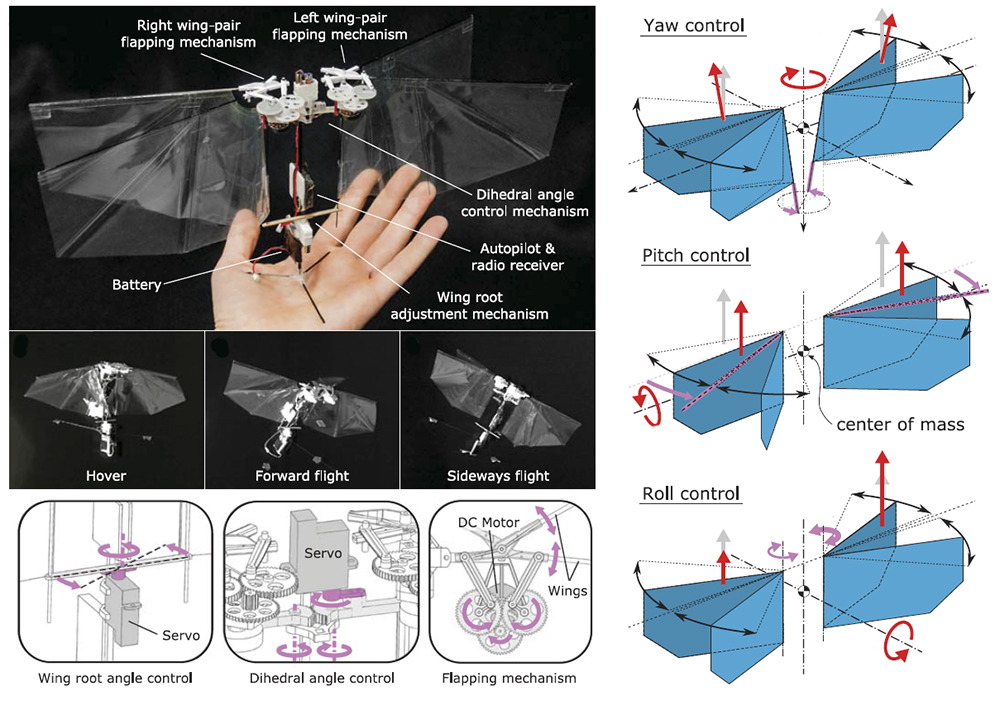
De flapperende robot is door de Delftse ingenieurs speciaal voor dit onderzoek ontwikkeld. Weliswaar beschikt het DelFly-lab aan de TU Delft al over flapperende robotjes, maar die hebben allemaal een staart voor het sturen. ’We hebben de aandrijving van de vleugels zo veranderd dat we daar de stuurbewegingen mee mogelijk maken, dus zonder staart’, zegt Karásek.
De robot heeft vier 14 cm lange vleugels die worden aangedreven door kleine motoren. Ze flapperen zo’n 17 keer per seconde, en de robot kan op een enkele batterijlading zo’n 5 minuten achter elkaar vliegen. De robot vliegt autonoom. De beweging wordt gecontroleerd door een autopilot aan boord, een programmeerbare minicomputer en sensoren voor de versnelling en de stand van de robot.
De robot heeft drie verschillende manieren om van richting te veranderen, zie ook de illustratie hierboven:
- Hij kan naar links of rechts draaien door de hoek van de vleugels links en rechts ten opzichte van elkaar te veranderen, waardoor de voortstuwing links en rechts van elkaar verschilt.
- Hij kan naar boven en naar beneden hellen door zijn vleugels meer naar achter of naar voren de verdraaien.
- Hij kan om zijn as kantelen door de linker of de rechter vleugel extra te laten flapperen en zo aan één kant extra stuwkracht te geven.
Voor de tests werden tal van vliegpatronen in de autopilot geprogrammeerd om te zien of de robot in staat is scherpe bochten te maken.




