
Bionische robotarm met octopusgrijper
Mechatronicabedrijf Festo ontwikkelde een robotarm die werkt als de slurf van een olifant en grijpt als een inktvis.
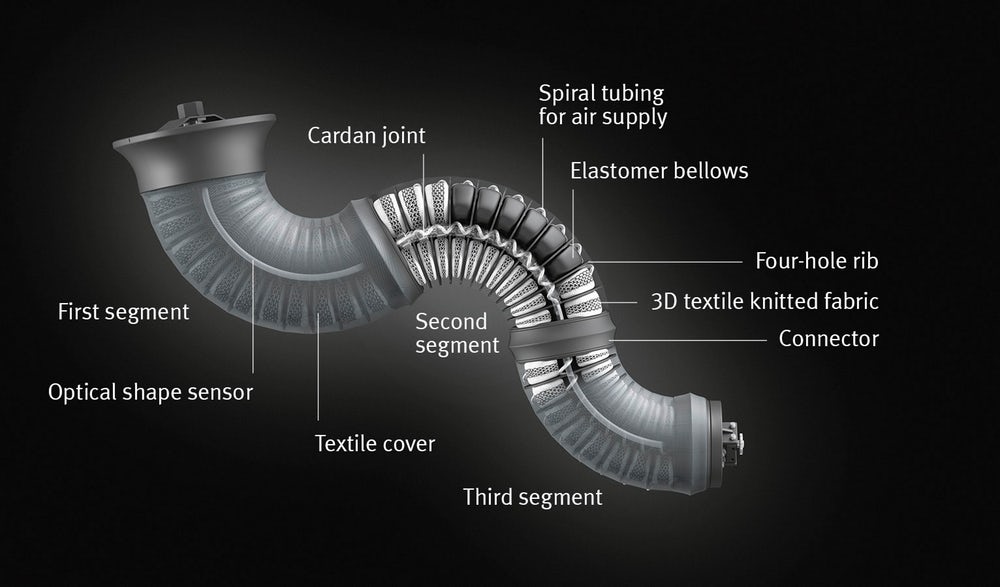
De bionische robotarm bestaat uit een flexibele polyamide balgenstructuur die met luchtdruk wordt bediend. De arm is opgebouwd uit verschillende componenten waarin de luchtdruk afzonderlijk kan worden geregeld. Danzij de balgen is de robotarm net zo flexibel als de slurf van een olifant. Festo presenteerde zijn nieuwe robotarm aan de vooravond van de Hannover Messe die eind van deze maand plaatsvindt.
Het principe van de slurfachtige robotarm is al bedacht in 2010, toen nog met een relatief eenvoudige grijper, zie de video hieronder voor de werking van het balgensysteem.
De grijper is van recenter datum. Hij is gemaakt van zacht siliconenmateriaal en wordt ook met luchtdruk aangestuurd. Onder druk buigt de grijper zich om het voorwerp dat vervolgens met de zuignappen aan de binnenkant wordt vastgegrepen. De zuignappen bevinden zich aan de binnenkant van de grijper, zie de video hieronder.
Met de bionische arm wil Festo twee doelen bereiken: grotere flexibiliteit en samenwerking met mensen.
- De octopusgrip zorgt ervoor dat de robotarm de meest uiteenlopende voorwerpen kan vastpakken, anders dan traditionele robots die meestal zijn uitgerust met niet één soort grijper voor één bepaald product.
- De bionische arm reageert direct op aanraking door terug te wijken. Zodoende kan een mens prima met de arm samenwerken, zonder het risico op een harde botsing.





