
Autonome boten vormen brug
Stel dat er in het centrum van Amsterdam ineens een brug nodig is of een tijdelijk podium op de grachten. Dan kunnen autonome boten die nu worden ontwikkeld uitkomst bieden.
MIT in de Verenigde Staten en het AMS Institute in Amsterdam werken samen aan de roboat. Uiteindelijk kan een grote vloot van autonome bootjes over de grachten van Amsterdam varen: om afval op te halen, goederen te vervoeren en als watertaxi. Dat zou een hoop auto- en vrachtverkeer schelen in de overvolle binnenstad.
Vloot van autonome schepen
Momenteel test MIT een schaalversie van de bootjes, al gebeurt dat nog niet in open water. De roboats kunnen inmiddels zelf aanmeren aan de wal, of aan andere roboats.
Vooral dat laatste is cruciaal in de ontwikkeling van een succesvol concept. Een vloot van roboats - zo voorzien de bedenkers - kan in de toekomst samenklikken en zo een pop-upbrug vormen op plekken waar zo'n brug ineens nodig is, bij een evenement bijvoorbeeld. Een ander concept is dat de roboats samen een podium in de gracht vormen, of een plein waar een markt kan worden gehouden.

L-vorm of rechte lijn
De onderzoekers hebben de testmodellen (schaal 1:4) nu voorzien van een algoritme dat ze in staat stelt om als groep diverse vormen aan te nemen. Een verzameling roboats kan zich dankzij dat algoritme volledig autonoom van elkaar losklikken, vervolgens veilig naar een andere locatie varen en daar dan een nieuwe constellatie vormen - zoals een brug. De makers presenteerden hun bevindingen onlangs op een roboticasymposium in de VS.
Op filmpjes van de test, in een zwembad van MIT, is te zien hoe het in zijn werk gaat. Een stel gekoppelde roboats maakt zich los en vormt vervolgens binnen enkele minuten verschillende andere vormen, zoals een L-vorm of een rechte lijn. Ook complexere vormen zijn mogelijk, stellen de makers, maar dan duurt het wel langer.
Leiders en werkers
De makers omschrijven het nieuwe algoritme als een doorbraak. Elk van de vaartuigen zou immers in staat moeten zijn om te weten waar de andere boten zijn, ze moeten het onderling eens worden over hoe ze losklikken, vervolgens zonder te botsen naar dezelfde plek varen en daar weer een nieuwe constellatie vormen.
Maar als daadwerkelijk elke boot al deze berekeningen moet maken, dan zou het hele proces traag en inefficiënt verlopen. De onderzoekers verdeelden de boten daarom in twee typen: leiders en werkers. Een of meer werkers sluiten zich aan bij een leider om samen een 'verbonden-vaartuigplatform' (CVP) te vormen.
Van NEMO naar Marineterrein
Alle roboats zijn voorzien van vier schroeven, een draadloze microcontroller, sensoren en autonome vergrendelmechanismen. Een leider heeft daarnaast ook nog eens een gps-systeem, en kan zijn richting, positie en snelheid berekenen. Elke leider kan daarnaast met alle verbonden werkers communiceren, en met de andere leiders.
Over een jaar al willen de onderzoekers roboats gebruiken om een dynamische brug te vormen tussen het wetenschapsmuseum NEMO en het tegenoverliggende Marineterrein, een afstand van zestig meter. Wie daar momenteel wil oversteken, moet tien minuten omlopen. Maar met de roboat-brug, bestaande uit een voortdurend draaiende cirkel van varende platforms, zou je al in twee minuten aan de overkant zijn.
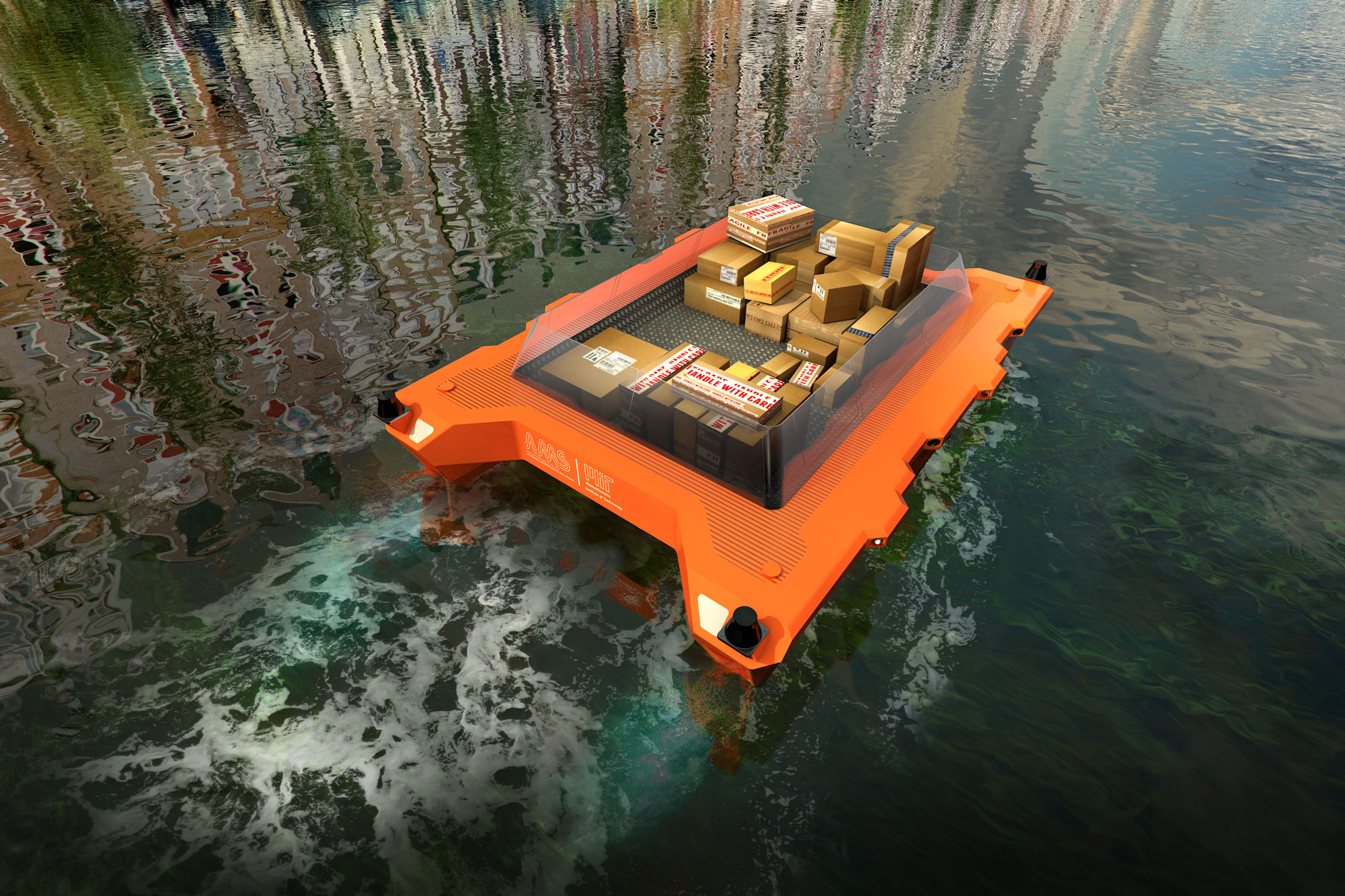
Beeld: MIT/AMS Institute





