
Autonome auto moet leren slippen
Ook autonome auto’s moeten gecontroleerd slippen onder de knie krijgen. Stap een, het meten van de sliphoek, is goed te regelen met de standaardsensoren die in alle auto’s zitten. Dat blijkt uit het onderzoek van Conno Kuyt, waarop hij vandaag afstudeert aan de TU Delft, als eerste van de masteropleiding Vehicle Engineering.
Wie wel eens een slipcursus heeft gedaan, weet wat je met een goede slip kunt doen. Door het stuur gecontroleerd om te gooien en de banden te laten piepen, kun je sneller de bocht om of een plotseling opdoemend dier op de weg ontwijken.
 Met de autonome auto die sterk in opkomst is, is het van belang dat ook de regeltechniek aan boord van zo’n auto leert slippen (driften is de term die autotechnici gebruiken). ‘Echt goed driften kunnen alleen professionele coureurs. Maar de computer in een autonome auto kan veel sneller handelen dan de mens, dus dat biedt mogelijkheden’, vertelt Kuyt.
Met de autonome auto die sterk in opkomst is, is het van belang dat ook de regeltechniek aan boord van zo’n auto leert slippen (driften is de term die autotechnici gebruiken). ‘Echt goed driften kunnen alleen professionele coureurs. Maar de computer in een autonome auto kan veel sneller handelen dan de mens, dus dat biedt mogelijkheden’, vertelt Kuyt.
Sliphoek
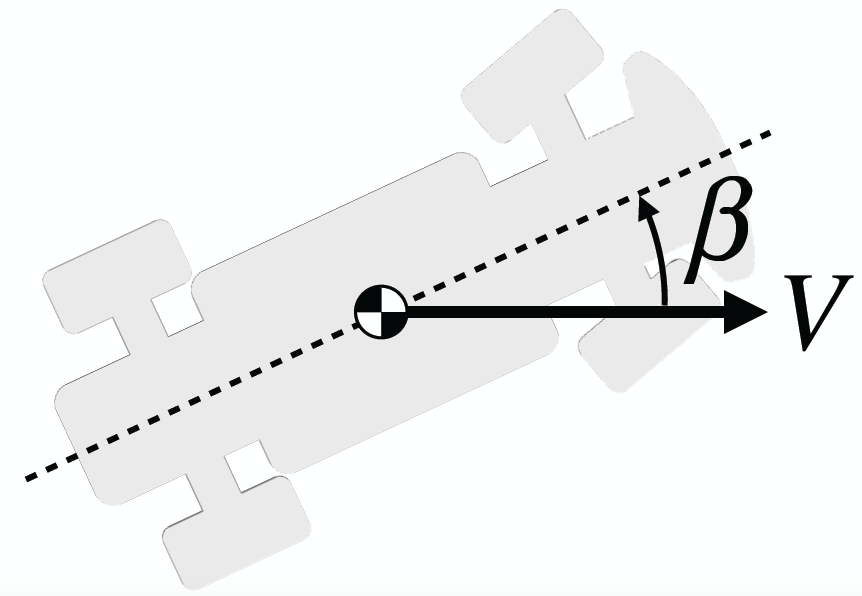
Maar kunnen de standaardsensoren die in de betere auto’s zitten, goed de sliphoek (β in de figuur hierboven) meten? Met die vraag begon Kuyt aan zijn afstudeeronderzoek.
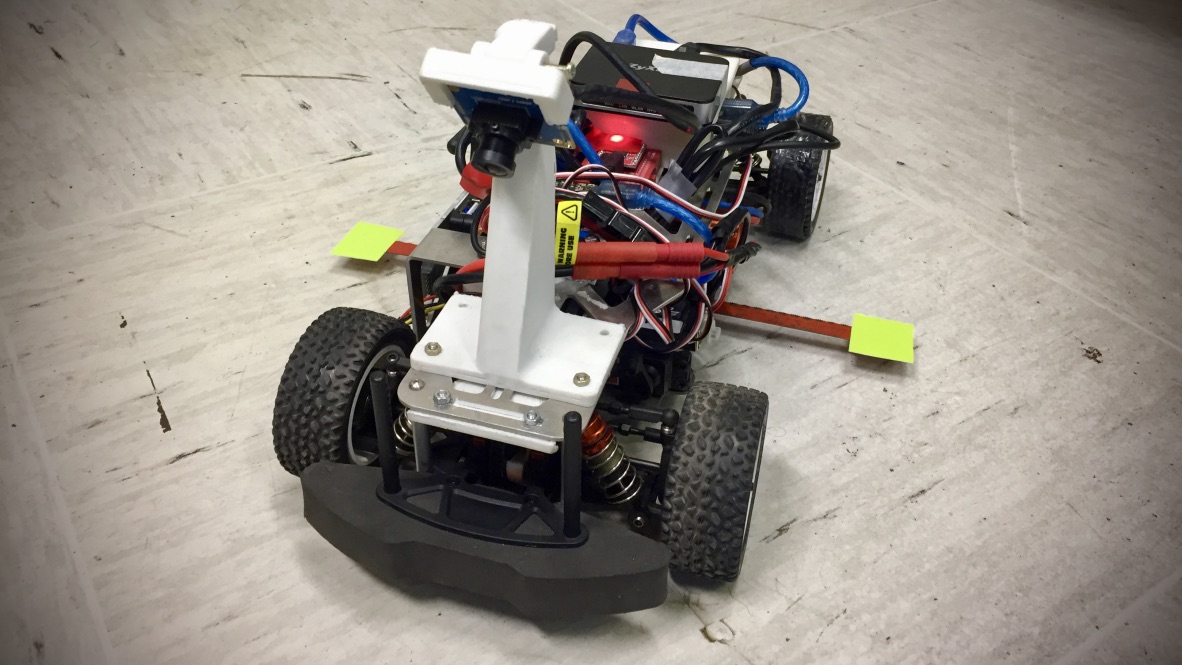
Om dit experimenteel te testen, bouwde hij een schaalmodel van een auto (zie foto hieronder), met aan boord encoders (de dingen die de omwentelingen van de wielen meten), een inertial measurement unit (IMU, die versnellingen meet) en een camera die de ondergrond in beeld brengt. De beelden van de camera worden geïnterpreteerd door een algoritme. ‘Zo’n camerasysteem zit ook in de duurdere auto’s en dient als lane warning system, dat laat weten als je je baan verlaat’, aldus Kuyt.
Sensoren combineren
Uit Kuyts experimenten blijkt dat de hoek van de drift goed is te meten met de genoemde sensoren. Gebruik je alleen een sensor los, dan is een nauwkeurigheid haalbaar van 70 tot 80 %, zo blijkt uit zijn onderzoek. Echt interessant wordt het als je metingen van verschillende sensoren combineert: dan gaat de nauwkeurigheid richting de 90 à 100 %. ‘Je benut als het ware de sterke kanten van de verschillende sensoren en heft de slechte kanten op’, zegt Kuyt. Overigens werden bij alle proeven de metingen van de sensoren steeds gevalideerd met een externe camera die het pad van het autootje vastlegde.
Nu blijkt dat de hoek van de drift van een autonome auto goed is te meten, is de volgende stap om een controller (een stuk regeltechniek) te ontwerpen die deze hoek kan vasthouden.
Start-ups
Kuyt blijft geboeid door dit onderwerp, maar zoekt het na zijn studie in het bedrijfsleven, misschien wel in de Verenigde Staten. ‘Het gaat daar hard. Er wordt veel geld geïnvesteerd in autonome auto’s. In Silicon Valley zijn de afgelopen tijd wel tien start-ups uit de grond geschoten.’
Aan de TU Delft gaat het onderzoek verder. Na Kuyt, de eerste die aan de TU Delft aan het onderwerp werkte, zijn er inmiddels bachelorstudenten mee aan de slag gegaan. Zij hebben een kopie gebouwd van de meet-modelauto van Kuyt. Eens kijken of die ook autonoom in een fijne slip terecht kan komen.
Beeld: Conno Kuyt





