
Algoritme maakt 3D-kaart van complex gebouw
Bij een noodgeval is het belangrijk dat hulpverleners weten hoe een gebouw er vanbinnen uitziet. Een onderzoeker van de Universiteit Twente heeft een algoritme ontwikkeld dat 3D-plattegronden kan maken vanuit een laserscan van het gebouw.
Bepaalde gebouwen zoals ziekenhuizen, winkelcentra en treinstations staan voor de brandweer bekend als hoogrisicogebouwen. Het zijn complexe gebouwen waar de brandweer snel moet kunnen ingrijpen in geval van nood. Een gebruikelijke plattegrond werkt niet altijd even intuïtief en is niet altijd aanwezig.
Onderzoeker Shayan Nikoohemat van de Universiteit Twente heeft een computerprogramma ontwikkeld dat hiervoor een oplossing heeft. Met minimale informatie van het gebouw maakt het programma een 3D-plattegrond. Woensdag promoveerde hij op dit onderzoek.
Rugzak
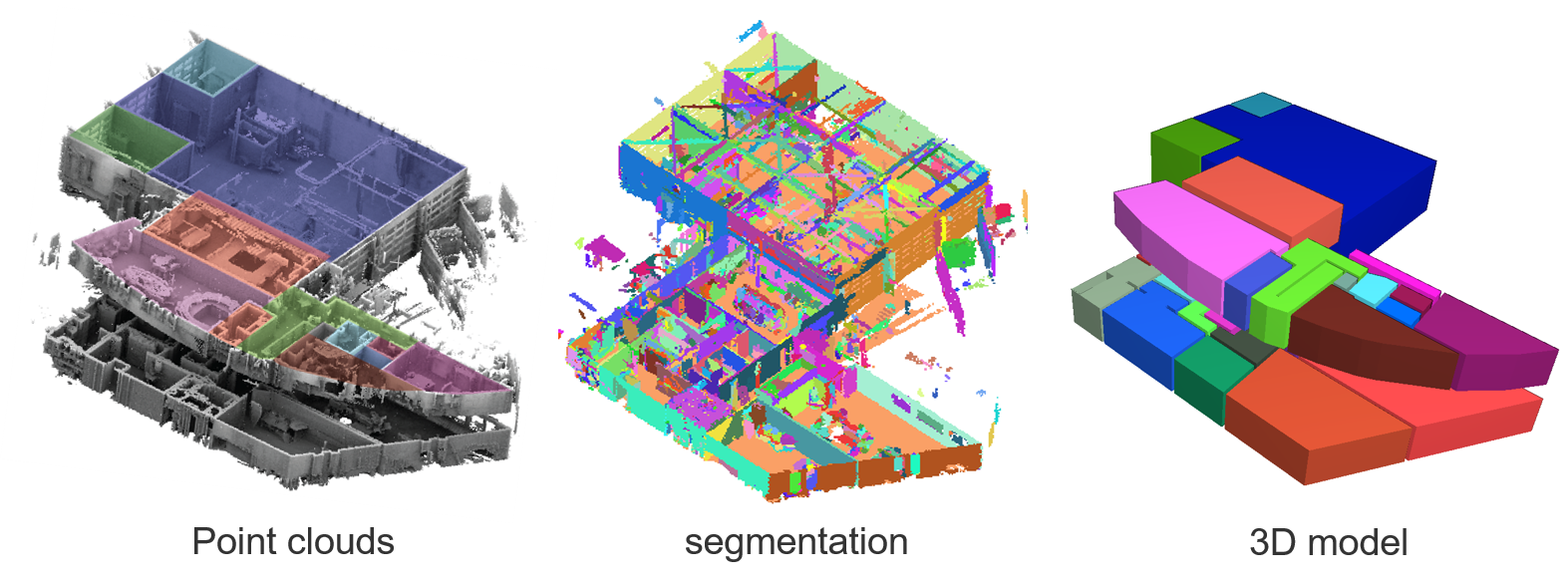
Om de plattegrond te maken gebruikt de onderzoeker Lidar, door middel van weerkaatsingen van de laserstralen worden obstakels in kaart gebracht. Uit een totale scan van het gebouw komt een zogeheten puntenwolk, een verzameling aan miljoenen punten in een ruimte die laat zien waar objecten zijn. Wat deze objecten zijn is in deze puntenwolk nog onbekend.
'De laserscanner die we hiervoor gebruikten zit in een soort rugzak', zegt hij. 'Tijdens het wandelen door een gebouw kan deze scanner de puntenwolk van de binnenkant van het gebouw maken.' Met deze rugzak kunnen de onderzoekers binnen een uur een ruimte met dertig kamers scannen van ongeveer 300 vierkante meter.' Het maken van een 3D-kaart uit deze data kost vervolgens slechts tien minuten op een reguliere computer.
Deze snelheid is voordelig voor gebouwen die vaak veranderen. Plattegronden van deze gebouwen zijn al snel achterhaald. Dus een snelle manier om een recente kaart te maken is handig.
Algemene regels
De algoritmen van Nikoohemat kunnen aan de hand van de puntenwolk zelfstandig identificeren wat alle objecten zijn. Hiervoor hanteert het programma een aantal regels gebaseerd op waar objecten zich bevinden en de vorm. Het is bijvoorbeeld logisch dat een groot vlak dat zich tussen de vloer en het plafond bevindt een muur is. Meubels bevinden zich vaak op de vloer en raken meestal niet tot aan het plafond. Zo maakt het programma onderscheid tussen de verschillende obstakels uit de puntenwolk.
Nadat de informatie in het model is geladen, wordt eerst de ruis verwijderd. Daarna wordt het meubilair geïdentificeerd en ook weggehaald. Uiteindelijk maakt het computerprogramma een 3D-plattegrond van de overgebleven objecten in de ruimte, zoals muren, deuren en vloeren.
Glas
De uitdaging voor de onderzoeker was om meer complexe gebouwen in kaart te brengen. 'Veel meubilair in de omgeving maakt het interpreteren van de data moeilijker. Kasten, stoelen en tafels blokkeren muren, waardoor het algoritme zelf de muur moet aanvullen', zegt Nikoohemat.
'En ook grote ramen in gebouwen zijn lastig te identiciferen door het computerprogramma.' De laser gaat door glas heen, waardoor het een lege ruimte lijkt. Daarom moet het algoritme deze informatie zelf aanvullen, afgeleid uit bijvoorbeeld de aanwezigheid van een venster dat wel laserlicht reflecteert. Hoe meer glas, hoe complexer het is voor het programma om te raden waar een raam zit.
Robuust
Voor het algoritme blijft er in complexe gebouwen dus behoorlijk wat te raden over. De vraag voor de onderzoekers was dan ook of het programma goed genoeg kon raden om gebouwen zelfstandig correct in beeld te brengen. Is het robuust genoeg. Daarvoor heeft de onderzoeker al verschillende gebouwen succesvol in kaart gebracht, waaronder een universiteitsgebouw en een brandweerkazerne. Deuren, trappen en muren zijn goed te herkennen door het algoritme.
Nu de onderzoeker is gepromoveerd werkt hij aan de optimalisatie van het algoritme, meubels in een ruimte worden nog niet altijd goed herkend. Zijn collega Samar Karam is ondertussen bezig de laserscanner-rugzak te ontwikkelen. Tezamen zal dit straks te gebruiken zijn als middel om relatief snel 3D-plattegronden te maken.
Beeld: Collega Samar Karam met de laserscanner-rugzak. Beeld: Shayan Nikoohemat

More articles




