
Autonome waterrobot brengt rivier in kaart
Rivieren, meren en havens in kaart brengen was tot nu toe grotendeels mensenwerk. Een robotvaartuig kan het nu ook en zelfs beter.
Eureka is de rubriek voor 'productontwerpen voor morgen' uit het maandblad De Ingenieur.
Een accurate kaart van waterwegen is belangrijk voor de veiligheid van het scheepvaartverkeer, de infrastructuurplanning en voor wetenschappers om de verandering van rivierbeddingen en kustlijnen te kunnen volgen. Elke twee jaar worden daarom nieuwe kaarten van de waterwegen gemaakt: een handmatig en tijdrovend proces.
Licht vaartuig met sensoren
Het Duitse onderzoeksinstituut Fraunhofer IOSB biedt daarvoor nu een alternatief: een autonoom vaartuig dat waterwegen zelfstandig in kaart kan brengen. Fraunhofer gebruikte het commercieel verkrijgbare ‘Otter’-platform van het bedrijf Maritime Robotics en rustte het vaartuig uit met sensoren en andere hardware. Het vaartuig is klein en licht; het is slechts twee bij anderhalve meter groot en weegt 64 kilogram.
Robotstofzuiger
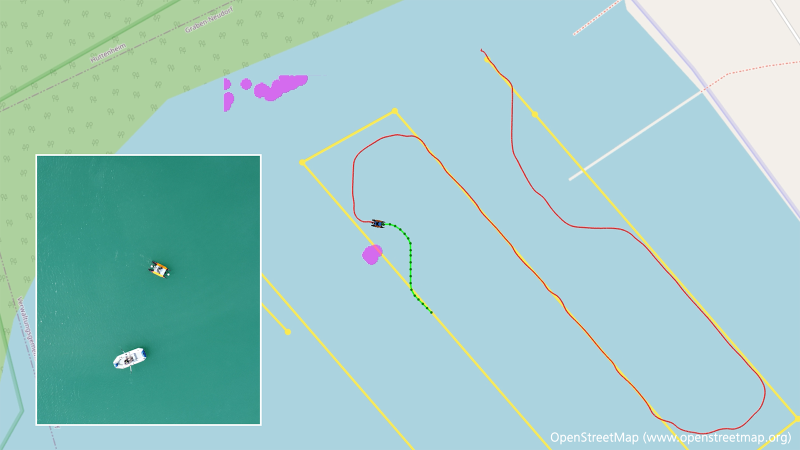
Het vaartuig meet zowel het wateroppervlak als de diepte van de waterweg en verwerkt die gegevens in een 3D-kaart. Het vaartuig tekent vervolgens net als een robotstofzuiger een zigzagroute over het gebied uit en ontwijkt daarbij bewegende en uitstekende objecten.
Voor metingen aan het wateroppervlak gebruikt het vaartuig laserscanners en camera’s. Onderwater brengt een multibeam sonar de afstand tot de bodem in kaart. Fraunhofer testte het prototype in een aantal meren en experimenteert ook bij kustlijnen in de Oostzee, waar het water honderden meters diep is.
Onderdeel van intelligent systeem
Wat de vinding zo waardevol maakt volgens Fraunhofer, is dat de robot gemakkelijk kan worden aangepast voor andere doeleinden, zoals het uitbaggeren van waterwegen en voor passagier- of vrachtvervoer. Uiteindelijk zou de robot onderdeel kunnen worden van een intelligent systeem dat spoor-, weg- en watervervoer met elkaar stroomlijnt.
Tekst: Sija van den Beukel
Foto: Fraunhofer IOSB





